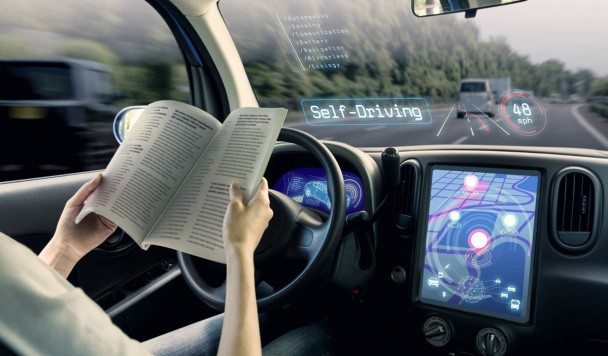
Перестроение в дорожном потоке - простой маневр для человека. Опытные водители выполняют его практически интуитивно. Но для автопилота это - непростая и ответственная задача. Беспилотный автомобиль принимает решение, используя вместо мозга и мускульной памяти сложную систему сенсоров и программные алгоритмы, основанные на машинном обучении.
Исследователи Popular Science обратились к специалистам по беспилотной технологии из четырех компаний - стэнфордского стартапа drive.ai, проекту Массачусетского технологического института nuTonomy, Uber и Waymo. Они выяснили, какие вычисления производит беспилотный автомобиль во время простого маневра перестроения между полосами.
Чтение световых сигналов

Световые сигналы дорожного трафика и окружения крайне важны для беспилотных автомобилей. Инженеры drive.ai при помощи технолгии глубокого обучения (deep learning) учат свои автомобили анализировать обстановку. К примеру, если горит зеленый свет, а впереди стоящий автомобиль не двигается, автопилот может сделать вывод, что машина заглохла. Значит, нужно менять полосу и объезжать препятствие. Если же передний автомобиль остановился на красный свет, он просто следует правилам. Значит, нужно лишь дождаться, пока загорится зеленый и автомобиль тронется с места.
Алгоритмы учитывают и более специфические сигналы. К примеру, если на стоящем впереди автомобиле мигает аварийный сигнал, его точно нужно объезжать, так как он, вероятно, в ближайшее время никуда не поедет.
Анализ парковки
Одна из вещей, которые могут сбивать с толку автопилот в городе - автомобили, которые припаркованы у бордюра или частично стоят на нем. Такие автомобили занимают часть правой полосы. Компьютер каждый раз принимает новое решение о необходимости перестроения в соседнюю полосу для объезда препятствия.
Знание дороги
Компания NuTonomy, чьи беспилотные автомобили уже катаются по Сингапуру и Бостону, считает, что компьютер должен учитывать специфику определенных районов.
К примеру, перед беспилотным автомобилем останавливается идущий впереди грузовик. Это может быть краткосрочная остановка, и тогда беспилотнику имеет смысл подождать несколько секунд. Либо грузовик остановился надолго, и тогда компьютер должен начать маневр перестроения в соседнюю полосу.
Здесь на помощь приходят карты, на которых отмечаются потенциальные места разгрузки грузовых автомобилей. Так, если фургоны часто останавливаются около определенного магазина, этот участок дороги будет отмечен соответствующим образом. Если перед беспилотным автомобилем на таком участке дороги остановится грузовик, беспилотник не будет выжидать, а сразу начнет объезжать препятствие.
Вежливое вождение
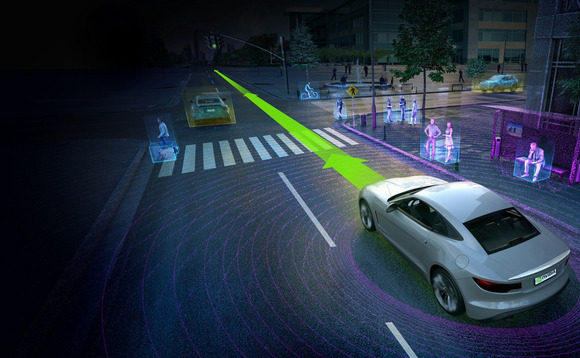
Если какой-либо водитель попытается втиснуться в поток, беспилотный автомобиль притормозит, пропуская его. Автомобили Waymo настроены на вежливое обращение с велосипедистами. Встретив велосипедиста на дороге, беспилотник постарается держаться ближе к левому краю полосы, давая велосипеду больше свободного пространства. Такое поведение становится возможным благодаря тому, что бортовые камеры постоянно осматривают пространство вокруг транспортного средства, а лазерные радары измеряют расстояние до окружающих объектов.
Готовность к повороту
Вообще, беспилотный автомобиль старается лишний раз не перестраиваться из полосы в полосу и просто держится потока. Но в некоторых случаях, к примеру, перед поворотом, перестроение просто необходимо. Перед выполнением маневра компьютер оценивает скорость других автомобилей и дистанцию до них. По-умолчанию машины Uber настроены таким образом, чтобы в потоке держаться на расстоянии двух корпусов до впереди идущего авто.
Ограниченный обзор
Пока автопилот нельзя считать самостоятельным в полной мере. Некоторые действия ему не доверяют. Так, высокие фуры и автобусы могут блокировать обзор камер и радаров. Встретив такое препятствие на дороге, беспилотный автомобиль может остановиться и попросить человека о вмешательстве. Впрочем, если общая ситуация а дороге позволит, беспилотник все же может попытаться очень медленно и аккуратно объехать преграду.
Вообще, ситуации, когда большое транспортное средство перекрывает обзор - одни из самых сложных для разработчиков беспилотных автомобилей. В будущем эту проблему можно будет решить, устанавливая на большие машины системы коммуникации “авто-авто”. Это позволит большим грузовикам передавать данные со своих радаров и камер легковым беспилотникам поблизости. Таким образом, все автомобили будут иметь представление о полной ситуации на дороге, вне зависимости от физического обзора каждого из них.