Хороший робот-исследователь должен отличаться высокой проходимостью и иметь способность протискиваться сквозь узкие места. Новый экспериментальный робот справляется с этими задачами, имитируя движения гусеницы.
9-сантиметровый мягкотелый робот разрабатывается в Университете штата Северная Каролина. Он смоделирован по образцу гусеницы перламутровой моли (Pleurotya ruralis). Подобно гусенице, робот движется вперед или назад путём последовательного сворачивания сегментов своего тела. Разница состоит в том, что гусеница использует для этого мышцы, а робот - нанопроводные нагреватели.
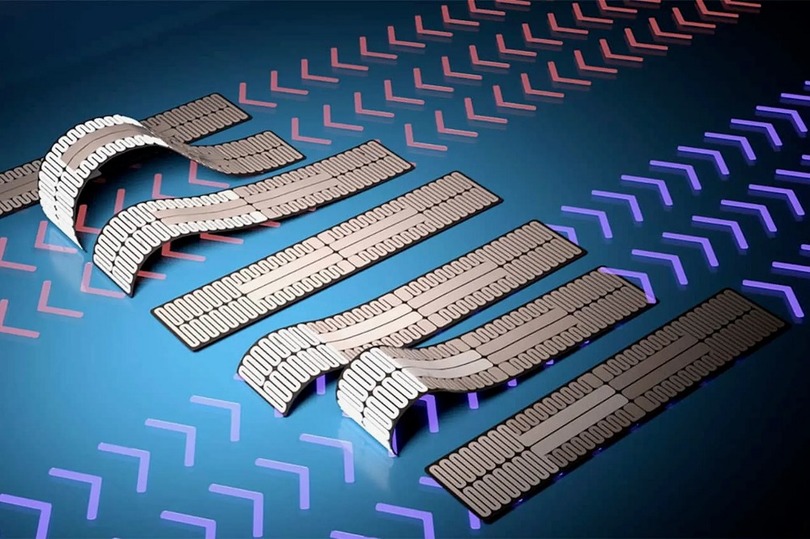
Корпус робота выполнен из двух уложенных друг на друга слоев разных полимеров. Слой сверху при нагревании расширяется, а снизу - сжимается. В верхний слой встроена сеть серебряных нанопроводов, имеющих множество точек вывода по всей длине робота.
Когда электрический ток подается в любую из этих точек, нанопровода в этой области нагреваются, нагревая таким образом полимер вокруг. Это заставляет тело робота сворачиваться в этой области. Таким образом, путем последовательного приложения тока можно создать скручивание, которое проходит по телу в любом направлении.
Выборочно активируя нанопроводные нагреватели в передней и задней частях робота, исследователи смогли заставить его проползти через 30-миллиметровый зазор высотой всего 3 мм.
«Такой подход к управлению движением мягкого робота очень энергоэффективен. Мы заинтересованы в изучении способов, которые могли бы сделать этот процесс еще более эффективным», - говорит профессор Йон Чжу, автор разработки.
Технология описана в статье, которая опубликована в журнале Science Advances.















