Современные технологические достижения открывают новые возможности для разработки вспомогательных и медицинских устройств, включая протезы. Если раньше такие протезы были жесткими и имели стандартную форму, то сегодня они становятся более мягкими, реалистичными и нередко оснащаются роботизированными элементами, значительно расширяющими их функциональность.

Несмотря на прогресс, большинство доступных роботизированных протезов трудно контролировать интуитивно. Это снижает их эффективность и ограничивает степень улучшения качества жизни пользователей.
Исследователи Итальянского института технологий (IIT) и Имперского колледжа Лондона разработали новый мягкий протез руки, управление которым может стать более удобным для пользователей. В своей работе, опубликованной в журнале Science Robotics, они представили инновационный метод управления, который сочетает координацию движений нескольких пальцев (постуральные синергии) с расшифровкой активности мотонейронов спинного мозга.
«Эта работа является результатом гранта ERC Synergy, в рамках которого наша группа в IIT совместно с командой Дарио Фарины из Имперского колледжа Лондона разработала новый, более естественный способ связи между пользователем и искусственной рукой. Мы добились этого, наладив взаимодействие между человеческим и искусственным интеллектом посредством нейронного соединения», — рассказал Антонио Бикки, соавтор исследования, в интервью Tech Xplore.
Точные движения пальцев
При выполнении ручных задач люди координируют движения пальцев динамическими способами, известными как постуральные синергии. Бикки, Фарина и их коллеги предложили метод управления протезом, который объединяет эти синергии с анализом электрических сигналов нервной системы. Это позволяет предсказывать движения, которые пользователь хотел бы совершить в данный момент.
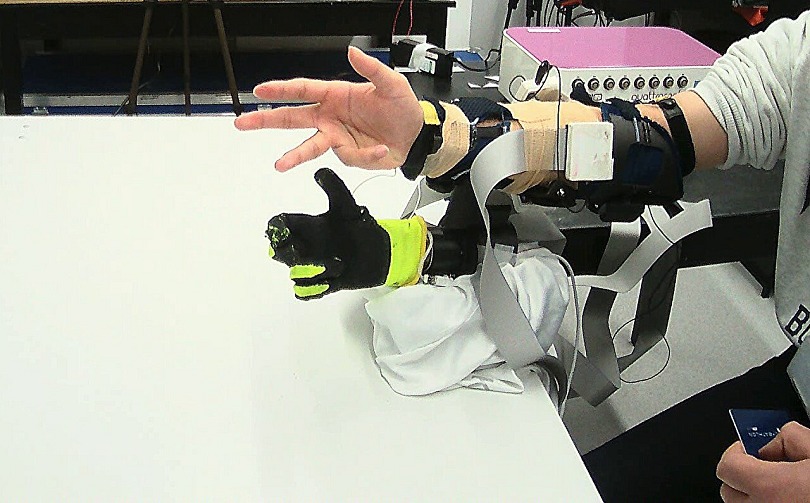
«Рука состоит из мягких материалов, используемых для кожи, сухожилий и связок, а также из жестких компонентов, имитирующих кости, — объяснил Бикки. - В отличие от обычных роботизированных рук, где элементы соединяются шарнирами, в нашем протезе искусственные "кости" перекатываются друг по другу. А особое расположение сухожилий позволяет руке адаптироваться к форме объектов, что обеспечивает интеллектуальное и автономное захватывание, схожее с движениями человеческой руки».
Одной из ключевых особенностей нового протеза является возможность не только интуитивно захватывать предметы, но и манипулировать ими определёнными способами. Например, пользователь сможет не просто взять бутылку воды, но и повернуть крышку пальцами, чтобы открыть её.
Исследователи провели серию экспериментов, в которых участвовали как люди с сохранёнными конечностями, так и пользователи протезов. Результаты оказались многообещающими: новая система управления позволила выполнять сложные движения и более точно манипулировать объектами по сравнению с традиционными протезами.
В будущем разработанная технология может быть применена для создания других протезов, а сам мягкий протез руки — доработан и протестирован в клинических условиях. Это может стать шагом к его коммерческому использованию.
«Мы установили связь между двумя уровнями организации движений руки: с одной стороны, было известно, что человеческий захват включает ограниченный набор доминирующих паттернов, с другой — сигналы мотонейронов, управляющие движением руки из спинного мозга, также формируют упрощённое пространство команд. Наше исследование объединило эти уровни, показав эффективность использования "языка мотонейронов" для более естественного управления мягкими бионическими руками», — заключил Бикки.