Двуногие и четвероногие роботы неплохо справляются с преодолением неровной местности, но для этого им требуется множество датчиков и сложных алгоритмов. Ученые предлагают более простой подход - добавить больше ног.
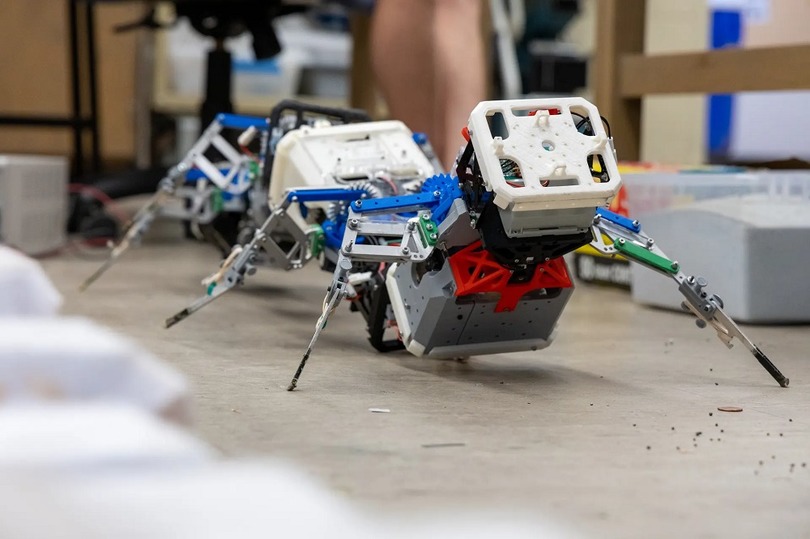
Команда Технологического института Джорджии (Georgia Tech) разработала робота-многоножку. Он подойдет для сценариев использования, в которых датчики могут быть слишком хрупкими или дорогими, либо условия окружающей среды могут меняться настолько быстро, что системы управления не будут успевать адаптироваться.
Как это работает?
Ученые были вдохновлены теорией связи, выдвинутой в 1948 году математиком Клодом Шенноном, который предположил, что для передачи сообщения на большое расстояние по шумной линии это сообщение должно быть разбито на повторяющиеся избыточные единицы. В случае с роботом этими “избыточными единицами” являются ноги.
Исследователи начали с робота с шестью ногами, который должен был двигаться по неровной поверхности, имитирующей хаотичную природную среду. После каждого пробега ученые добавляли дополнительные пары ног, пока число конечностей не достигло шестнадцати.
Оказалось, что чем больше ног имеет робот, тем проще ему преодолевать препятствия. Важно отметить, что движение машины происходит без каких-либо датчиков или адаптивного программирования. Ноги просто компенсируют друг друга. Если одна или несколько ног соскальзывают, другие все равно удерживают курс.
Безусловно, дополнительные ноги требуют дополнительной энергии. А значит, где-то существует точка, после которой которой затраты начинают перевешивать преимущества. Теперь ученым предстоит определить эту точку и найти оптимальный баланс проходимости и энергоэффективности машины.
Видео с движением робота можно посмотреть на сайте Georgia Tech.
Исследование опубликовано в журнале Science.