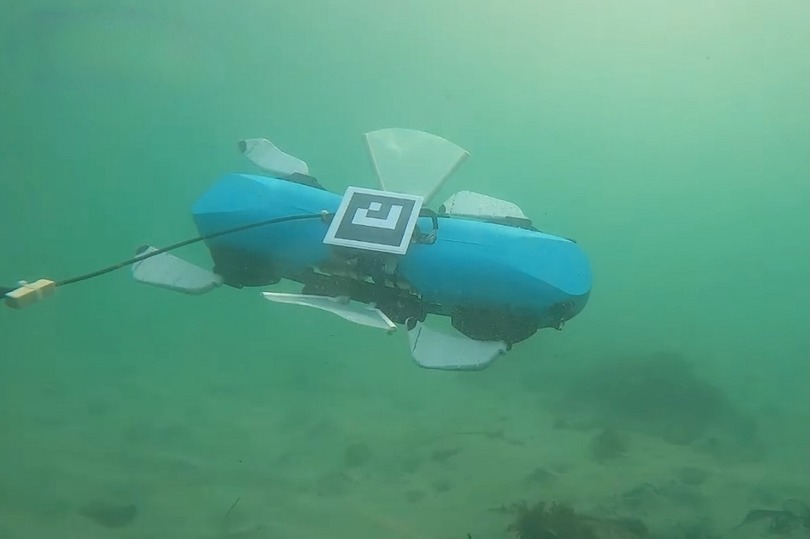
Инженеры из Южнокорейского Университета науки и техники Пхохана разработали инновационного подводного робота HERO-BLUE. Робот способен не только плавать под водой с помощью встроенных плавников, но и ходить или ползать по дну, подстраиваясь под рельеф и условия окружающей среды. Эта уникальная многофункциональность робота позволяет ему эффективно выполнять задачи, которые часто бывают затруднительны или вовсе невыполнимы для традиционных подводных аппаратов на дистанционном управлении (ROV).
Биомиметическое движение
Название робота HERO-BLUE в переводе звучит как “Синий Герой”, но на самом деле это сложная аббревиатура, которая расшифровывается как “Hazardous and Extreme environment RObot for Biomimetic multiLocomotion-based Underwater Expedition”. Это можно перевести как “Робот для экстремальной окружающей среды и подводных экспедиций с использованием множественных биомиметических способов передвижения”.
Биомиметикой (или биомимикрией) называют подход в инженерии, при котором устройства или их компоненты имитируют живые организмы.
Традиционные подводные роботы используют электрические двигатели для перемещения под водой. Однако такие двигатели склонны запутываться в водорослях, кабелях, сетях и других подводных объектах. Кроме того, они не могут эффективно работать в условиях сильного течения.
HERO-BLUE оснащен четырьмя мультирежимными плавниками (два спереди и два сзади) и двумя боковыми плавниками. Мультирежимные плавники состоят из полимерных панелей, соединенных эластомерными "сухожилиями". Эта конструкция позволяет плавникам оставаться жесткими при движении робота вперед и гибкими при обратном движении. Боковые плавники напоминают конструкцию плавников рыбы и обеспечивают маневренность.
Во время плавания, мультирежимные плавники имитируют движения грудных плавников рыбы. Боковые плавники могут включаться для более тонких маневров.
При столкновении с сильным течением, HERO-BLUE использует встроенные регуляторы плавучести, чтобы опуститься на дно и ходить по нему с помощью мультирежимных плавников. При ходьбе, плавники остаются жесткими во время толчка вперед и гибкими при обратном движении, подтягивая робота к следующему шагу.
Для передвижения в мелководье, где плавание затруднено, робот использует гибкий "позвоночник", вдохновленный строением саламандры. Этот позвоночник позволяет HERO-BLUE изгибаться, продвигаясь вперед даже при наличии течения.
В настоящее время HERO-BLUE является прототипом размером 80 x 60 x 30 см и весом 11,3 кг. Робот управляется дистанционно, но оснащен двумя камерами для стереоскопического зрения, что в будущем позволит ему работать автономно.
Описание этой необычной разработки опубликовано в журнале IEEE Transactions on Robotics.