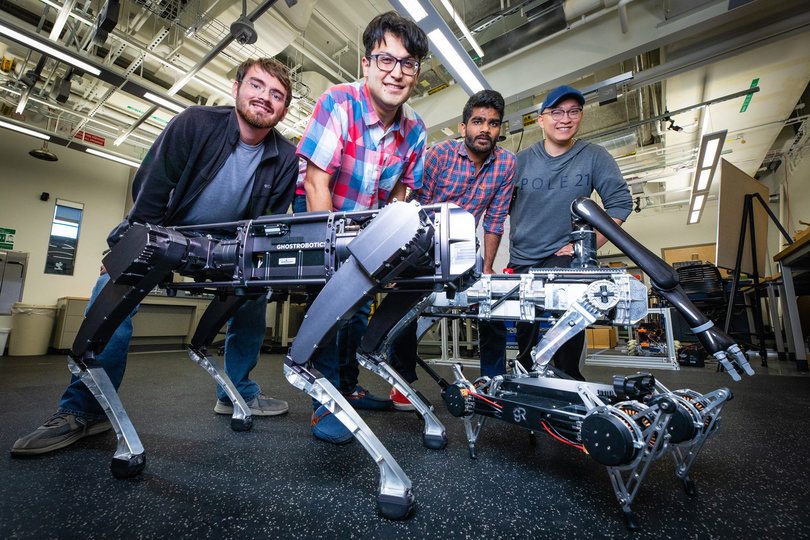
За последние десять лет четвероногие роботы-собаки достигли невероятной эффективности движений, но их все еще можно усовершенствовать. Исследователи из Политехнического университета Виргинии считают, что лучший вариант - максимально приблизить принцип действия таких машин к естественной биологии четвероногих животных. Ученые разработали сложную комбинацию алгоритмов и датчиков, которые позволяют роботам передвигаться, копируя движения реальных животных. Система имитирует поведение позвоночных, которые управляют балансом тела при помощи нейронов спинного мозга.
В процессе работы система считывает показатели датчиков-энкодеров в суставах робота, а такжеданные с инерционных датчиков, реагирующих на смену положения тела и изменения ориентации относительно земли. Таким образом, создается нечто вроде искусственного вестибулярного аппарата. Благодаря ему роботизированная собака ходит и бегает с практически естественной животной ловкостью и скоростью.
По словам ведущего автора разработки, доцента Политехнического университета Виргинии Кавеля Хамеда, чтобы алгоритмы, управляющие робототехникой, стали более эффективными, они должны быть “био-вдохновлены”. Лишь заимствование идей у живой природы позволит в конце-концов создать роботов, которые будут двигаться так же плавно и эффективно, как живые существа.