Ученые из Манчестерского университета совершили прорыв в разработке прыгающих роботов. Их новый проект способен преодолеть высоту свыше 120 метров, что значительно выше Статуи Свободы или лондонского Биг-Бена. Это колоссальный скачок по сравнению с предыдущим роботом-рекордсменом, который прыгал лишь на 33 метра.
Как это работает?
Достижение стало возможным благодаря сочетанию математических расчетов, компьютерного моделирования, лабораторных экспериментов и классической инженерной доводки. Исследователи оптимизировали размер, форму и расположение компонентов робота для обеспечения максимальной прыгучести.
Согласно исследованию, опубликованному в журнале Mechanism and Machine Theory, традиционные прыгающие роботы неэффективны. Они тратят энергию на лишние движения, отклоняясь от траектории или не полностью разгибая пружины перед прыжком.
“Прыгающие роботы уже существуют, однако их конструкция сталкивается с серьезными проблемами. Главной из них является недостаточная высота прыжка для преодоления сложных препятствий. Наша разработка значительно повысит энергоэффективность и мощность прыгающих роботов на пружинах”, - говорит соавтор исследования доктор Джон Ло, научный сотрудник по космической робототехнике в Манчестерском университете.
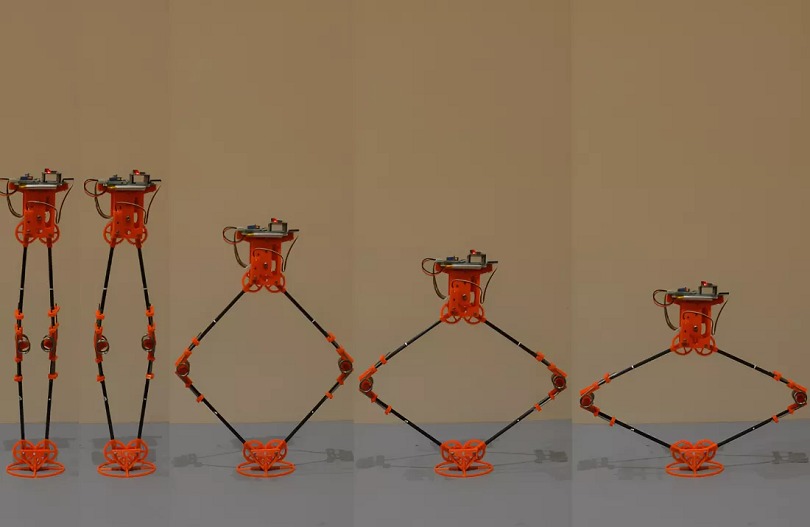
Ученые решили применить принципиально новый подход. Они сравнили два типа прыжкового механизма: с поступательным движением ног по прямой (поршневый) и с вращательным движением (как у кенгуру). Оба варианта имели свои преимущества и недостатки.
Модель с поршневым механизмом оказалась слишком тяжелой из-за смещения массы вниз, что приводило к задержке перед прыжком. Вращательные же ноги расходовали энергию на преждевременный запуск робота, до того как пружины полностью высвобождали свою мощность.
Объединив лучшие элементы обоих вариантов, команда нашла оптимальное решение: разместить большую часть веса наверху для устойчивости и использовать длинные, прямолинейно выдвигающиеся ноги, чтобы предотвратить преждевременный старт.
Теперь, определив идеальный механизм прыжка, ученые сосредоточены на управлении направлением прыжков и увеличении количества прыжков на одной зарядке. По словам ученых, этого можно достичь за счет использования кинетической энергии, получаемой при приземлении, которая будет значительна, учитывая высоту прыжка робота – свыше 100 метров.
Потенциальные области применения таких роботов огромны. Представьте себе прыгающих роботов, которые помогают в поисково-спасательных операциях, преодолевая завалы, или прокладывающих новые пути для исследования чужих планет, прыгая по неизведанным ландшафтам. Для космических применений команда планирует разработать более компактные модели для облегчения транспортировки и развертывания.