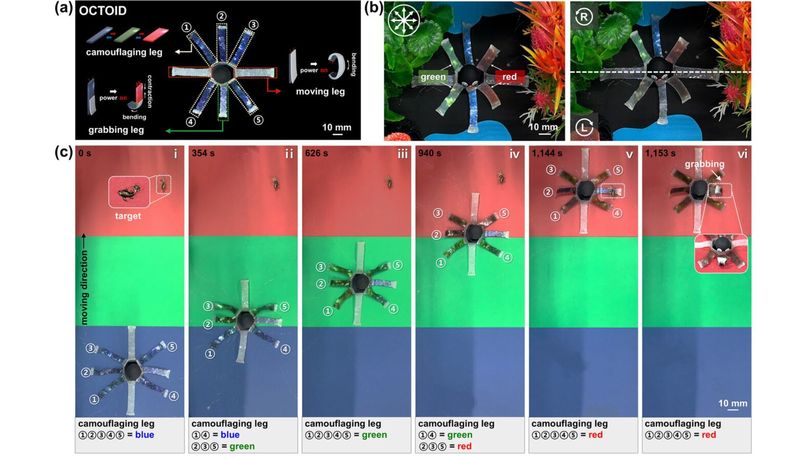
Природа — гениальный инженер. В погоне за эффективностью, гибкостью и многофункциональностью ученые все чаще заимствуют решения у живых организмов. Особый интерес представляют головоногие моллюски, в частности, осьминоги, чьи тела являются образцом адаптивности. Вдохновившись этими созданиями, южнокорейские исследователи разработали мягкого робота OCTOID, который не просто подражает форме, но и объединяет в себе две ключевые способности осьминога: динамический камуфляж и программируемое изменение формы.

Как устроен искусственный осьминог?
Сердцем технологии OCTOID являются холестерические жидкокристаллические эластомеры (ХЖКЭ). Эти «умные» материалы обладают уникальным свойством: при механической деформации или нагреве они не только меняют форму, но и цвет. Представьте себе материал, который ведет себя как хамелеон, но на молекулярном уровне — именно так работают ХЖКЭ.
Конструкция робота модульная и состоит из «ног», каждая из которых представляет собой двухслойную структуру:
- Активный слой: Мягкий и цветной. Он содержит тонкие нагревательные элементы из нихромовой проволоки. При подаче электрического тока слой нагревается, сжимается и меняет свой структурный цвет, например, с синего на красный.
- Пассивный слой: Жесткий и прозрачный. Он служит основой, которая не меняет цвет, но обеспечивает механическую прочность и позволяет активному слою изгибаться определенным образом.
Прочная связь между слоями позволяет системе выдерживать более 100 циклов преобразований без потери свойств.
Три функции в одном роботе
Инженеры сконструировали три типа специализированных «ног», которые демонстрируют всю палитру возможностей OCTOID.
Камуфляж: Искусство исчезать
«Ноги-хамелеоны» состоят из двух активных слоев. Нагреваясь, они быстро (менее чем за 40 секунд) меняют окраску, позволяя роботу адаптироваться к фону. В будущем такая технология может стать основой для создания активного камуфляжа или интеллектуальных меток.
Движение: Гибкость и точность
Асимметричная конструкция из активного и пассивного слоев заставляет «ногу» изгибаться при нагреве, подобно мышце. Оптимальное соотношение толщин (8:1) позволяет роботу совершать направленное движение. На испытаниях OCTOID прополз 20 мм со скоростью 0,45 мм/с, что доказывает реальную возможность передвижения.
Захват: Сила и надежность
Комбинируя сокращение активного слоя с изгибом пассивного, робот может обхватывать и поднимать предметы. Поразительно, но один такой манипулятор способен удерживать груз массой до 6 граммов — это в 30 раз больше его собственного веса! При этом он надежно сохраняет 90% своей эффективности даже после сотни циклов.
Перспективы и трудности
Несмотря на впечатляющие результаты, перед технологией стоят вызовы. Основные из них — относительно медленная скорость реакции на нагрев и охлаждение, а также потенциальная усталость материала после множества циклов. Вес металлических нагревательных элементов также несколько ограничивает гибкость.
Исследователи уже работают над решениями: поиск более легких и эффективных проводящих материалов (например, полимеров или углеродных нанотрубок), оптимизация теплопередачи и углубленное тестирование на долговечность. Преодоление этих барьеров откроет дорогу для создания по-настоящему автономных мягких роботов, способных самостоятельно ориентироваться в сложной среде, принимать решения и выполнять задачи, где требуются одновременно «зрячие» и «ловкие» манипуляторы.
Исследование опубликовано в журнале Advanced Functional Materials.