Инженеры из Калифорнийского университета в Лос-Анджелесе разработали робота, способного передвигаться по металлическим конструкциям. Отличительной особенностью робота является его "конечность" в виде разматывающейся металлической ленты строительной рулетки.

Уникальная конструкция
Существующие роботы-скалолазы используют либо комбинацию вакуумных систем и колес, либо магнитные ноги. Однако первые испытывают трудности при преодолении даже небольших препятствий, а вторые отличаются медлительностью и сложной конструкцией. Новый робот, получивший название EEWOC (Extended-reach Enhanced Wheeled Orb for Climbing, “расширенная колесная сфера для скалолазания”), призван решить эти проблемы.
В режиме передвижения по земле EEWOC использует два колеса для балансировки. Для подъема по вертикальным поверхностям робот задействует специальную конечность EEMMMa (Elastic Extending Mechanism for Mobility and Manipulation, “эластичный выдвижной механизм для мобильности и манипуляций”).
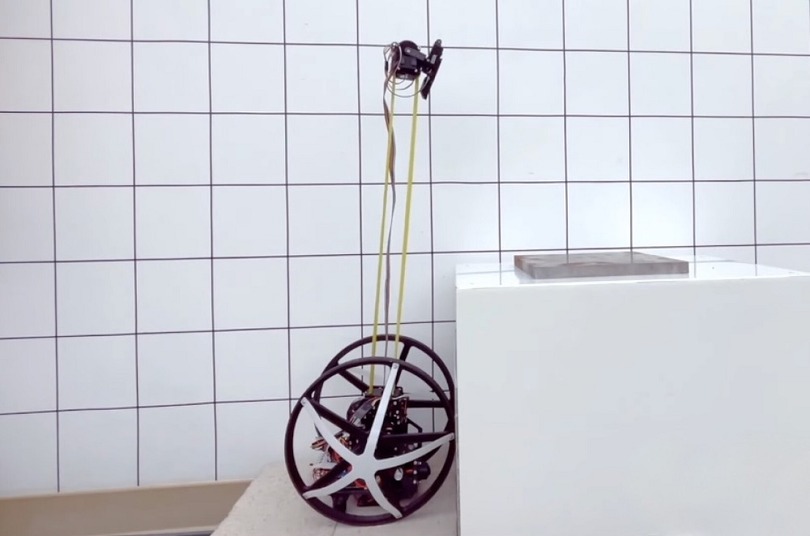
EEMMMa представляет собой встроенную катушку с металлической лентой, напоминающую рулетку. Лента разматывается вверх, огибает специальный блок, образуя перевернутую букву "U", и крепится обратно к верхней части робота. На изгибе ленты расположен захват с регулируемым электромагнитом.
Для прямого подъема EEWOM разматывает ленту, удерживая захват наверху. Затем электромагнит фиксируется на металле, после чего робот подтягивает себя вверх, сматывая ленту обратно. Нижний магнит обеспечивает фиксацию робота на конструкции во время следующего цикла подъема.
Для преодоления выступов EEWOM использует захват как тормоз, не позволяя ленте прокручиваться. Лента накапливается под прямым углом, позволяя магниту достичь цели. Затем робот подтягивается к магниту, переваливаясь через выступ.
EEWOC имеет небольшой размер (диаметр 260 мм, вес 2,1 кг) и отличается высокой скоростью подъема - до 0,24 метра в секунду.
В будущем инженеры планируют оснастить робота несколькими конечностями EEMMMa для обеспечения разнонаправленного движения. Также разрабатываются варианты захватов, не требующих магнитных поверхностей, для подъема по деревьям или стенам.