Исследователи Disney совместно с инженерами из нескольких университетов представили необычную разработку: систему, которая помогает двуногим роботам переживать падения без серьёзных повреждений. Проект отвечает на давний вопрос робототехники — что происходит с машиной, когда она теряет равновесие, и как минимизировать последствия удара о землю.
Зачем роботам учиться падать
Современные двуногие роботы уверенно шагают по неровным поверхностям и обходят препятствия, но одно неизменно остаётся сильнее их алгоритмов — гравитация. Стоит машине потерять равновесие, и она нередко падает «как есть»: со скованными суставами или хаотичным размахиванием конечностей. Такие неконтролируемые движения приводят к поломке датчиков, трещинам корпуса и дорогостоящему ремонту.
В Disney решили посмотреть на проблему иначе: если падение неизбежно, почему бы не сделать его безопасным? Идея заключалась в том, чтобы не сопротивляться столкновению с землёй, а направлять падение так, чтобы оно проходило мягче и обходило хрупкие элементы — например, голову, аккумуляторы или сенсорные блоки.
Команда поставила задачу научить робота менять положение тела в воздухе и приземляться в устойчивой, защищённой позе. В центре подхода — предотвращение повреждений, а не удержание баланса любой ценой.
Система безопасного падения
Базой для разработки стала технология обучения с подкреплением. Виртуальная версия робота тысячи раз падала в компьютерном симуляторе. Каждое цифровое падение добавляло системе знаний: какие движения уменьшают силу удара, а какие, напротив, делают приземление опаснее.
Алгоритм начислял «баллы» за грамотные манёвры — снижение нагрузки на корпус или защиту важных узлов — и снижал оценку за беспорядочные или неэффективные движения. Так формировалась оптимальная последовательность действий, позволяющая роботу группироваться и смягчать падение.
В симуляторе робот проходил сотни сценариев: от боковых срывов на скорости 2 м/с до быстрых кувырков с вращением бёдер. Скорости и направления менялись случайным образом, чтобы устройство не запоминало один-единственный «правильный» путь, а научилось адаптироваться.
Чтобы расширить спектр возможных посадок, исследователи создали 24 тысячи устойчивых поз и «роняли» виртуального робота с высоты пояса. Физический движок отбирал рабочие варианты. Десять дополнительных поз предложили художники — среди них были эффектные растяжки, приседы и широкие, почти театральные «плюхи». Главное условие — все они должны соответствовать пределам реальных суставов и моторов. Для большей реалистичности в модели добавили случайные помехи: небольшие толчки и сбои ориентирования.
Тестирование реального робота
Обучение занимало двое суток на мощных видеокартах: одновременно в симуляторе падали 4000 виртуальных роботов. Небольшая нейросеть обрабатывала угол поворота каждого сустава, ориентацию корпуса и параметры движения, отправляя команды 50 раз в секунду. Алгоритм использовал метод PPO (proximal policy optimization), который позволяет корректировать поведение постепенно, без резких скачков.
Разработчики задали разный уровень чувствительности для разных частей тела: ноги — мягкие, голова — с повышенной защитой. По итогам тренировок робот научился в доли секунды переходить от расслабленной позы к плотной защитной «свертке».
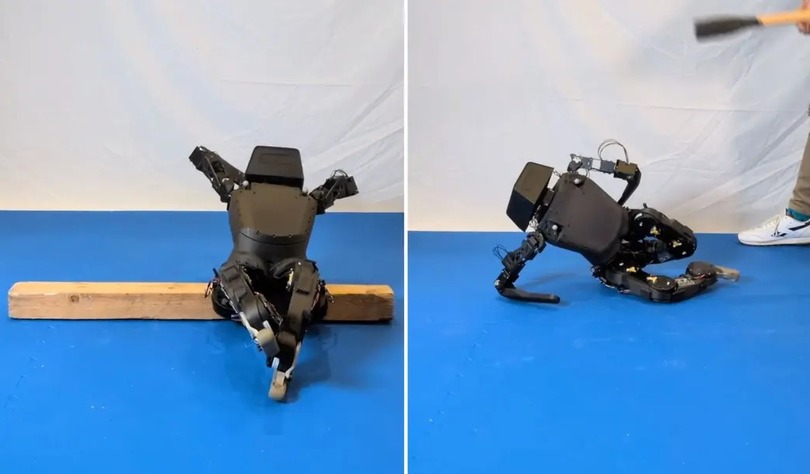
Полученную политику перенесли на реального 16-килограммового робота с двумя подпружиненными ногами и механическими руками. Его траектория отслеживалась системой motion capture и передавалась контроллеру для уточнения движений.
Испытания показали: внезапное падение больше не означает дорогостоящих поломок. Машина умеет падать контролируемо — почти как каскадёр, который заранее знает, как сгруппироваться.
Результаты исследования опубликованы в журнале arXiv.















