Исследователи из Калифорнийского университета в Санта-Барбаре (UCSB) и Технического университета Дрездена (TU Dresden) разрабатывают новую концепцию робототехники, создавая коллектив небольших роботов, функционирующих как "умный" материал.
По словам Мэтью Девлина, бывшего докторанта в лаборатории профессора машиностроения UCSB Эллиота Хокса и ведущего автора статьи, опубликованной в журнале Science, учёные разработали метод, позволяющий роботам вести себя как материал с изменяемыми свойствами.
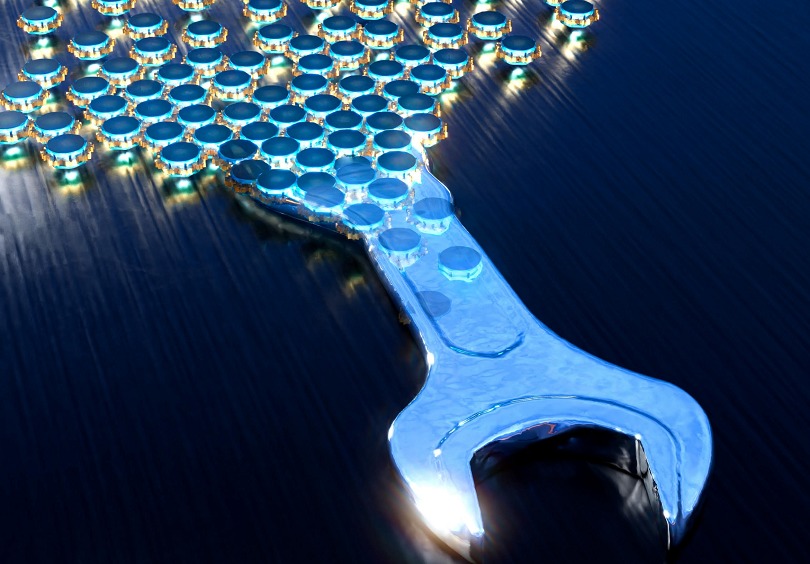
Самособирающиеся роботы с динамическими свойствами
Коллектив представляет собой небольшие автономные дискообразные роботы, похожие на хоккейные шайбы, которые могут самостоятельно собираться в различные формы, изменяя свои свойства по необходимости. Главной задачей исследования было создание материала, обладающего одновременно высокой жёсткостью и прочностью, но способного при этом принимать новую форму при необходимости.
Вместо использования внешних сил для изменения формы, роботы реагируют на внутренние сигналы, что позволяет им сохранять структуру, а при необходимости — перестраиваться.
Учёные черпали вдохновение в работах Отгера Кампаса, бывшего профессора UCSB, а ныне директора кластера "Физика жизни" в TU Dresden, который изучал, как эмбрионы формируют свою физическую структуру. Эмбриональные ткани обладают высокой адаптивностью: они могут изменять форму, самовосстанавливаться и регулировать свои структурные свойства.
Исследования показали, что эмбрионы могут переходить между жидким и твёрдым состоянием, что позволяет им формировать органы и ткани. Этот процесс, известный в физике как переход жёсткости, помогает клеткам управлять структурными свойствами тканей в процессе развития организма.
Движение и изменение формы за счёт координации сил
В новых роботах внутренние силы преобразуются во взаимные тангенциальные усилия благодаря восьми моторизованным шестерням на внешней стороне каждого робота. Эти механизмы позволяют роботам перемещаться и взаимодействовать друг с другом даже в ограниченном пространстве.
Девлин отметил, что управление движением роботов осуществляется с помощью световых сенсоров, снабжённых поляризационными фильтрами. При попадании света на сенсор поляризация указывает направление вращения шестерёнок, что помогает роботам менять форму. При постоянном освещении они способны синхронно выстраиваться и адаптироваться.
В ходе экспериментов учёные обнаружили, что колебания сигналов, передаваемых роботам, играют ключевую роль в формировании необходимых структур. Это открытие основано на более ранних исследованиях, показавших, что флуктуации сил, генерируемых клетками, являются важным фактором преобразования тканей.
Эти колебания позволяют коллективу роботов изменять форму и прочность с меньшими затратами энергии, чем при постоянном напряжении. Исследователи подчеркнули, что это неожиданное открытие, сделанное в процессе сбора данных, имеет большое значение для разработки энергоэффективных роботов, работающих в условиях ограниченного энергоснабжения.