Исследователи из Университета науки и технологий города Поханг (POSTECH) в Южной Корее разработали новый тип дрона, вдохновившись аэродинамическими способностями летяги — небольшого грызуна, известного своей способностью к планирующему полету и высокой маневренности.
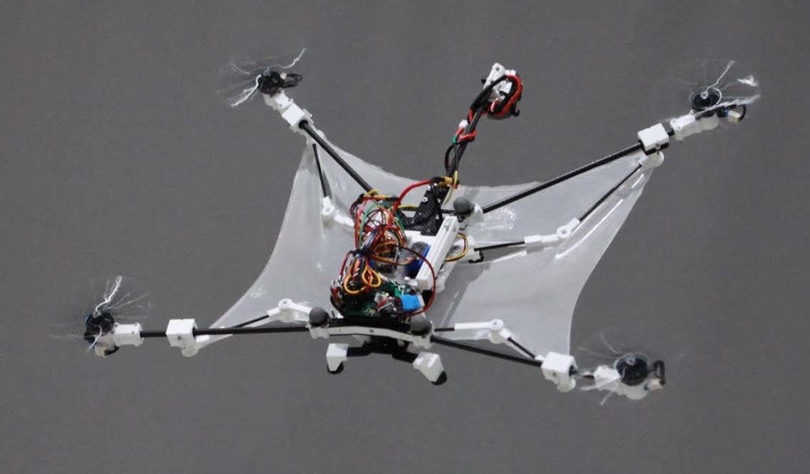
Новая модель дрона оснащена складными крыльями, что делает её более компактной и позволяет повторить уникальные траектории полета животного. По словам ученых, устройство демонстрирует улучшенные показатели контроля: точность слежения за траекторией повысилась на 13,1% по сравнению с обычными дронами без крыльев.
Ответ на вызовы традиционной аэродинамики
Современные дроны играют ключевую роль в таких задачах, как инспекция объектов, сбор данных и поисково-спасательные операции. Однако их возможности ограничиваются физическими факторами — например, насыщением тяги, сложностью управления и трудностями моделирования аэродинамики в реальном времени.
Даже несмотря на успехи в области искусственного интеллекта и оптимизации полетных алгоритмов, эти физические ограничения по-прежнему мешают дронам эффективно работать в стесненных и изменяющихся условиях.
Чтобы справиться с этими проблемами, специалисты POSTECH совместно с Агентством оборонных разработок Южной Кореи (ADD) создали уникальный дрон, способный динамично изменять форму крыла для повышения точности и стабильности полета.
От биомеханики к машинному обучению
Масса устройства составляет всего 548 граммов, из которых 24 грамма приходятся на гибкие силиконовые крылья. Дрон управляется четырьмя высокоскоростными моторами и двумя сервоприводами, регулирующими развертывание крыльев.
В основе управления лежит микроконтроллер Arduino Portenta H7 с двухъядерным процессором STM32. Также устройство оснащено навигационной системой GNSS, барометром и двумя инерциальными измерительными модулями (IMU), что обеспечивает высокую стабильность в полете.
Ключевой особенностью является система координации тяги и крыльев (Thrust-Wing Coordination Control, TWCC), которая синхронизирует работу двигателей с крыльями для более точного вертикального маневрирования — одного из самых сложных аспектов для обычных квадрокоптеров.
Для дополнительного улучшения аэродинамической реакции используется физически ориентированная рекуррентная нейросеть, обученная на данных реальных полетов. Она в реальном времени регулирует угол атаки крыльев, адаптируя поведение дрона к текущим условиям.
Новейшая версия дрона демонстрирует высокую маневренность в условиях сложных внешних сред, включая препятствия и нестабильные маршруты. Это расширяет его применение за пределы лабораторий и заранее подготовленных траекторий, делая технологию перспективной для практического использования.
Авторы исследования подчеркивают, что комбинация биомиметических решений, адаптивного управления и машинного обучения представляет собой значительный прогресс в области беспилотных летательных аппаратов.
Результаты работы были опубликованы в научном журнале arXiv.