Исследователи из Массачусетского технологического института (MIT) и Университета Висконсин-Мэдисон разработали необычный подход к проектированию подводных глайдеров, используя искусственный интеллект. Новая система машинного обучения позволяет создавать более аэродинамичные и энергоэффективные формы, аналогичные тем, что встречаются у морских животных.
Морские животные, такие как рыбы и тюлени, могут преодолевать большие расстояния с минимальными энергозатратами благодаря своей обтекаемой форме. Современные автономные подводные аппараты, хотя и стремятся к такой же эффективности, обычно имеют стандартные обтекаемые формы в виде торпед, ограниченные возможностями традиционного проектирования и необходимости сложных полевых испытаний.
Искусственный интеллект в проектировании
Исследователи MIT и их коллеги предложили полуавтоматизированный процесс, в котором ИИ моделирует разнообразные 3D-формы и оценивает их гидродинамические характеристики в симуляторе физики. После оценки наилучшие формы можно распечатать на 3D-принтере с меньшими затратами энергии и материалов по сравнению с традиционными методами.
Как объясняет Питер Ичен Чен, один из ведущих исследователей проекта, их система позволяет изучать нестандартные конструкции, которые раньше не рассматривались: «Мы создали инструмент, который позволяет тестировать формы, слишком сложные для ручного проектирования».
От подводных животных к новым глайдерам
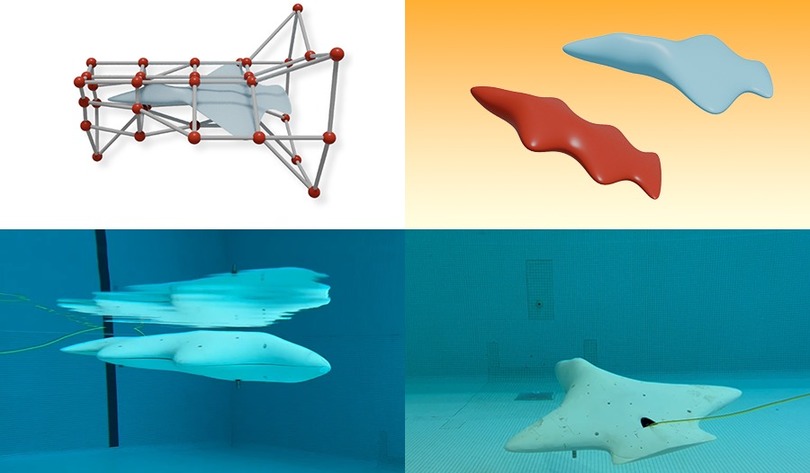
На начальном этапе команда проанализировала 3D-модели различных морских объектов — от подводных лодок до акул и скатов. Эти формы помещались в так называемые «деформационные клетки», позволяющие изменять геометрию моделей. Полученные формы подвергались симуляции на разных углах атаки (например, -30°, как при нырянии).
Эти данные были использованы для обучения нейросети, которая прогнозирует, насколько эффективно глайдер будет двигаться в воде. Основной критерий оценки — соотношение подъёмной силы к сопротивлению (lift-to-drag ratio): чем оно выше, тем эффективнее движение.
В рамках проекта было создано два прототипа: один с двумя крыльями, напоминающий бумажный самолётик, и другой — с четырьмя плавниками, похожий на плоскую рыбу. Оба были распечатаны на 3D-принтере как полые оболочки с отверстиями, чтобы упростить погружение и снизить вес конструкции.
Первый прототип прошёл испытания в аэродинамической трубе MIT, где результаты оказались очень близки к симуляции — отклонения составили всего около 5%. Второй этап тестов прошёл в бассейне, где оба устройства продемонстрировали более высокую эффективность по сравнению с традиционным торпедообразным глайдером.
Внутри оболочек находился блок управления, включающий насос для изменения плавучести, систему смещения центра тяжести и электронику для управления движением.
Разработка открывает новые горизонты для создания адаптивных подводных аппаратов. Команда планирует усовершенствовать симуляции, чтобы ещё точнее прогнозировать поведение глайдеров в реальных условиях, и адаптировать конструкции к изменяющимся морским течениям. В перспективе — создание более тонких, манёвренных и миниатюрных устройств.