Инженеры Университета Южной Калифорнии (USC Viterbi) представили уникальную разработку — роботизированную руку MOTIF Hand, способную чувствовать тепло, давление и даже вес объектов. Это устройство стало результатом работы студенческой команды под руководством доцента кафедры информатики Даниэля Сейты и представляет собой важный шаг к созданию более интуитивных роботов.
Мультимодальные ощущения
В отличие от традиционных захватов, MOTIF Hand обладает мультимодальными сенсорами, то есть способна одновременно обрабатывать различные типы сенсорной информации. Система фиксирует:
- давление, что позволяет точно контролировать усилие захвата;
- температуру, избегая прикосновений к слишком горячим объектам;
- движение, реагируя на взаимодействие с окружающей средой.
Это приближает поведение робота к человеческому — например, при подъеме коробки или проверке, насколько горячая кастрюля.
Тепловизор в ладони
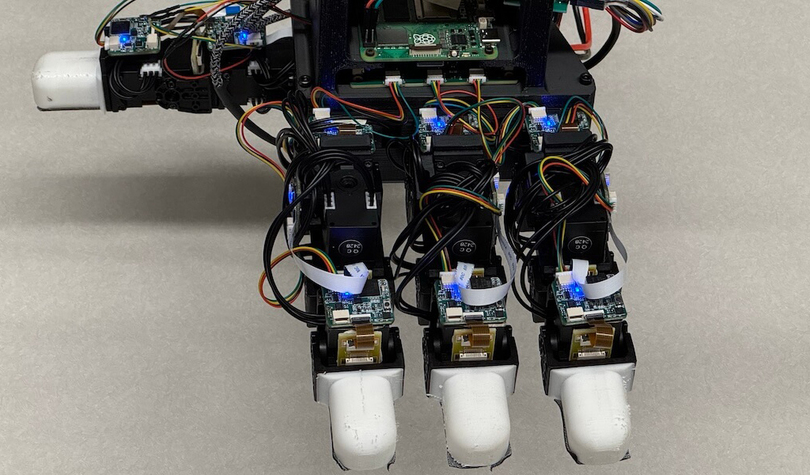
Одной из ключевых особенностей MOTIF Hand стала встроенная в ладонь тепловизионная камера, работающая без контакта. Так же, как человек может поднести руку к горячему предмету, чтобы оценить температуру, не касаясь его, робот использует ИК-камеру для считывания теплового излучения.
«Мы хотели передать роботу ту же интуицию, что используем сами», — отметил Сейта.
Ощущение веса
Чтобы понять, насколько тяжел предмет, рука использует метод встряхивания или легкого удара, как это делает человек, проверяя, наполнена ли бутылка. Камеры и визуальные системы здесь неэффективны — важны тактильные ощущения, которые обеспечивает механика пальцев и датчики внутри них. «Человеку недостаточно просто посмотреть — нужно почувствовать», — пояснил соавтор проекта Ханьян Чжоу.
Проект MOTIF Hand основан на предыдущей разработке — LEAP Hand, созданной в 2023 году в Университете Карнеги-Меллона. Обе системы имеют открытый исходный код, что, по мнению команды, поможет другим исследователям использовать и развивать технологию. «Открытость — ключ к прогрессу в научном сообществе», — подчеркнул Сейта.
Команда надеется, что новая платформа станет основой для дальнейших разработок в области робототехники. Статья с описанием исследования уже опубликована на научной платформе Arxiv.