Современные роботы всё чаще работают рядом с людьми — на заводах, в лабораториях и даже в медицинских учреждениях. Но безопасное взаимодействие требует от машин почти человеческих ощущений. Робот должен уметь заметить приближение человека заранее, чтобы избежать столкновения, и одновременно чувствовать лёгкое прикосновение, когда берёт хрупкие детали.
Объединить эти два навыка в одном сенсоре долгое время не удавалось. Теперь исследователи из Южно-китайского технологического университета утверждают, что нашли решение: они разработали гибкую сенсорную систему, способную динамически менять режим восприятия окружающей среды. Такой датчик позволяет роботу одновременно «видеть» приближающиеся объекты и точно ощущать контакт — почти как человеческая кожа.
Результаты работы опубликованы в научном журнале International Journal of Extreme Manufacturing.
Почему роботам трудно «чувствовать» как людям
Чтобы понять значение разработки, стоит вспомнить старую инженерную проблему. В сенсорных системах существует компромисс между дальностью обнаружения и точностью.
Небольшие электроды обеспечивают высокое разрешение тактильных ощущений — они отлично фиксируют давление, текстуру и форму предметов. Но такие сенсоры работают лишь на очень близком расстоянии.
Крупные электроды, напротив, способны обнаруживать объекты на дистанции благодаря более широкому электрическому полю. Однако точность при этом падает, и робот уже не может аккуратно манипулировать мелкими деталями.
Этот компромисс долгое время ограничивал развитие так называемой электронной кожи — гибких сенсорных покрытий для коллаборативных роботов.
Электрическое поле с «переменным фокусом»
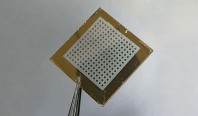
Новая разработка представляет собой гибкий массив ёмкостных сенсоров. Ёмкостные датчики измеряют изменения электрического поля, возникающие при приближении или прикосновении объектов.
Главная особенность технологии — динамический экранирующий слой, расположенный над электродами.
Изменяя электрические соединения между элементами массива и степень их экранирования, система может переключаться между двумя режимами:
- дальнее обнаружение объектов,
- высокоточная тактильная чувствительность.
Причём физический размер электродов остаётся неизменным. Меняется только конфигурация электрического поля — словно сенсор «перенастраивает фокус».
Идея, подсказанная человеческим глазом
Инженеров вдохновил простой биологический механизм — работа человеческого зрения.
Как объяснил один из авторов исследования, доктор Се, зрачок глаза постоянно меняет размер в зависимости от условий освещения и задачи. Когда мы читаем книгу, он сужается, чтобы повысить чёткость деталей. Когда смотрим вдаль в темноте — расширяется, чтобы собрать больше света.
Учёные применили тот же принцип к электрическим полям сенсора.
Если экранирующий слой сужает область чувствительности, система концентрируется на отдельных элементах массива. В этом режиме робот может распознавать тонкие тактильные детали — например, края небольших предметов.
Если же область сенсирования расширяется, электрическое поле распространяется дальше в пространство. Тогда робот способен обнаруживать приближающиеся объекты ещё до контакта.
По данным исследователей, такая архитектура позволила более чем вдвое увеличить максимальную дальность обнаружения. В экспериментах диапазон сенсирования вырос на 104,56 % по сравнению с традиционными датчиками.
Что показали испытания
В лабораторных тестах новый сенсор обнаруживал приближающиеся объекты на расстоянии свыше 90 миллиметров. Кажется немного? Но для роботизированной руки этого достаточно, чтобы вовремя остановиться и не задеть человека в загруженной производственной зоне.
Когда же происходит контакт, система демонстрирует впечатляющую чувствительность. Сенсор способен:
- фиксировать давление всего в несколько граммов,
- выдерживать нагрузки до 400 килопаскалей.
Иными словами, робот сможет одновременно аккуратно брать хрупкие детали и безопасно взаимодействовать с окружающей средой.
Почему внедрение пока не так просто
Несмотря на перспективные результаты, путь к промышленному применению ещё не завершён.
Для достижения высокой чувствительности исследователи использовали метод жертвенного шаблона — технологию, позволяющую создавать в материале сенсора микроскопические поры. В итоге формируется структура, напоминающая губку. Однако такой процесс может приводить к небольшим различиям между отдельными сенсорными элементами.
В прототипах разброс характеристик составил около 6,3–6,8 %.
Есть и другая проблема. Ёмкостные датчики чувствительны к внешним факторам: электромагнитным помехам, перепадам температуры и влажности. В промышленной среде с большим количеством мощного оборудования это может искажать показания.
Поэтому будущие версии системы, вероятно, будут включать:
- улучшенные методы экранирования,
- алгоритмы машинного обучения для фильтрации помех.
Почему это важно для будущего робототехники
Если инженерам удастся решить эти задачи, новая технология может серьёзно упростить сенсорные системы роботов.
Сегодня для восприятия окружающей среды машины часто используют несколько разных датчиков — камеры, лидары, датчики приближения и тактильные сенсоры. Но в перспективе часть этих функций сможет выполнять единая адаптивная электронная кожа.
Такая система будет одновременно:
- обнаруживать приближение объектов,
- предотвращать столкновения,
- точно ощущать физический контакт.
А значит, роботы станут безопаснее, гибче и гораздо лучше приспособятся к работе рядом с человеком.