Одно из основных предполагаемых применений для роботов с ногами - разведка на местах стихийных бедствий и техногенных катастроф. Зачастую ни колесные, ни даже гусеничные машина не способны передвигаться по сложным завалам. И даже паукообразным роботам делать это непросто. Но ученые придумали, как повысить скорость передвижения ходячих роботов по сложному ландшафту. Ключевым компонентом новой разработки стал кофе.
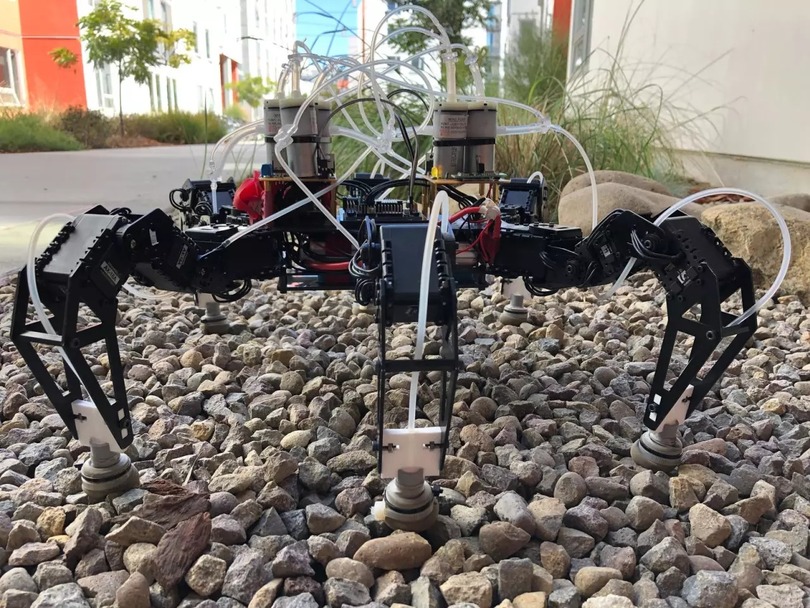
Инженеры Калифорнийского университета в Сан-Диего оснастили шестиногого робота “кофейными ступнями”. Такая ступня состоит из мягкой резиновой сферы, наполненной сухой кофейной гущей.
Когда нога находится в воздухе, гранулы кофейной гущи внутри оболочки остаются мягкими и сыпучими. Но стоит роботу наступить на грунт, начинает действовать эффект “сжимающей трансформации”. В результате этого эффекта гранулы сжимаются, формируя твердую, почти монолитную структуру.
Вы, наверняка, наблюдали этот эффект в повседневной жизни. Когда вы берете закрытую пачку молотого кофе, она, как правило, тверда как камень. Кажется, что гранулы кофе внутри слиплись в монолитный “кирпич”. Но стоит вскрыть упаковку, как как кофе становится мягким и сыпучим.
В робототехнике этот эффект можно использовать для улучшения сцепления ног робота с поверхностью сложной формы. Ступни машины могут действовать пассивно и активно. В пассивном режиме гранулы в оболочке сжимаются под собственным весом робота. В активном режиме пневматика высасывает воздух из резиновой оболочки, заставляя ее сжиматься и сдавливать гранулы.
Вот как меняется форма ступней робота в зависимости от грунта, по которому он передвигается:

Лабораторные испытания показали, что с такими ногами робот-гексапод на 40% быстрее передвигается по древесной щепе или гальке. Отчасти это связано с тем, что кофейные ступни на 62% уменьшают глубину, на которую нога робота проваливается в грунт. При этом робот тратит на 98% меньше сил на то, чтобы вытащить ногу из грунта:
Машину тестировали на плоских и на неровных поверхностях. Оказалось, что на плоской поверхности робот лучше передвигается в пассивном режиме. На сложном рельефе лучше задействовать пневматику, которая выкачивает воздух из ступней при каждом шаге. Теперь ученые намерены оснастить машину системой распознавания рельефа, чтобы робот автоматически задействовал пневматику в зависимости от того, на что он наступает.
Если хотите получать новости через мессенджер, подписывайтесь на новый Telegram-канал iGate