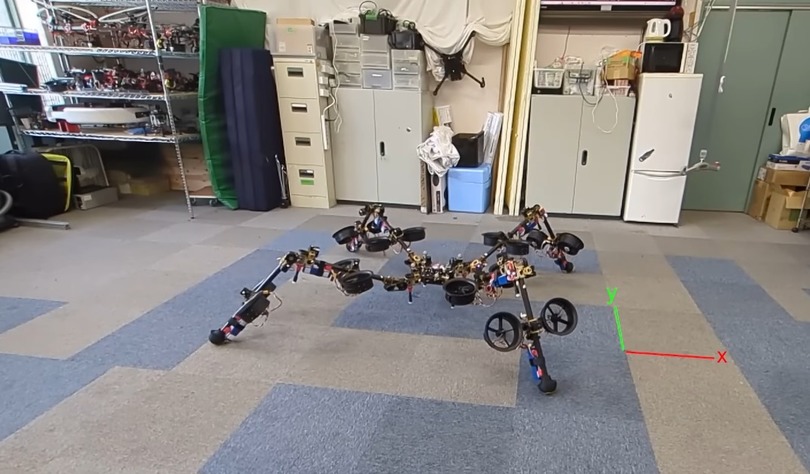
Исследователи Токийского университета представили уникального робота SPIDAR (Sensing, Processing, and Intelligent Dynamics for Aerial-ground Robot), способного эффективно передвигаться как по земле, так и по воздуху. Новинка представляет собой гибридную платформу с четырьмя лапами, каждая из которых оснащена векторизируемым ротором. Это позволяет роботу с высокой точностью переключаться между разными режимами передвижения.
Как отмечается в описании исследования, SPIDAR успешно демонстрирует как сложные воздушные манёвры с одновременным движением суставов, так и устойчивое ползание по поверхности. Такой уровень универсальности стал возможен благодаря новой системе управления тягой, разработанной специально для многомодальных движений.
Прорыв в эффективной мобильности
За последнее десятилетие роботы с комбинированными функциями ходьбы и полёта достигли значительного прогресса. Особенно перспективными считаются платформы с ногами, способные передвигаться по неровной местности и манипулировать объектами. Конструкция с четырьмя конечностями, как у SPIDAR, обеспечивает хорошую устойчивость и маневренность.
Однако ранние версии таких роботов сталкивались с проблемами в энергоэффективности и сложности управления при одновременном движении суставов. Кроме того, вертикально расположенные винты мешают друг другу, ухудшая устойчивость в полёте и точность захвата предметов.
Для решения этих задач команда разработала оптимизированный алгоритм управления, ограничивающий углы наклона роторов и предотвращающий аэродинамическое взаимное влияние. Также была внедрена гибридная система управления, сочетающая тягу и крутящий момент, что позволило эффективно двигаться без необходимости поднимать корпус над землёй.
Совместное управление тягой и движением суставов
Каждая нога SPIDAR состоит из двух подвижных сегментов с поворотными соединениями. Симметричная конструкция позволяет роботу двигаться в любом направлении. Встроенные роторы с двойными противоположно вращающимися винтами и независимыми моторами обеспечивают точное управление вектором тяги.
Система учитывает центр масс и использует физическую модель для расчета необходимых усилий со стороны моторов и суставов. PID-контроллеры регулируют угол и силу каждого ротора, обеспечивая стабильность положения. Чтобы предотвратить турбулентные помехи, робот ограничивает направления наклона винтов в зависимости от их расположения.
Во время ползания SPIDAR использует тягу для компенсации силы тяжести и удержания равновесия, особенно при одновременном отрыве всех конечностей от земли. Это позволяет ему сохранять устойчивость даже при динамичных манёврах и слабой конструкции сервоприводов.
Эксперименты показали, что SPIDAR способен стабильно передвигаться как по воздуху, так и ползком. Несмотря на сложности, связанные с лёгким корпусом и ограниченной мощностью суставов, робот продемонстрировал точность и координацию движений. В будущем команда планирует усовершенствовать систему управления за счёт обратной связи на основе динамики суставов, а также протестировать робота на неровных поверхностях и в условиях сложного захвата объектов.
Исследование опубликовано в открытом доступе на платформе arXiv.