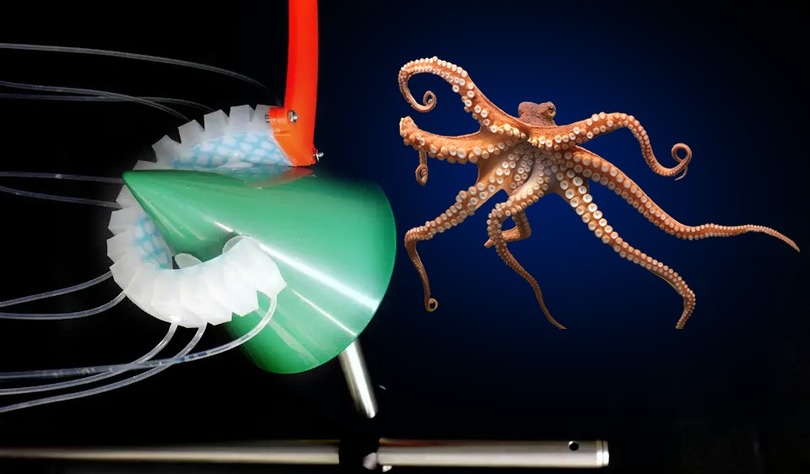
Учёные из Бристольского университета (Великобритания) создали мягкого робота, который умеет хватать предметы и анализировать окружающую среду без центрального компьютера. Его разработка вдохновлена нервной системой осьминога, где большая часть вычислений происходит локально — прямо в присосках.
Как это работает
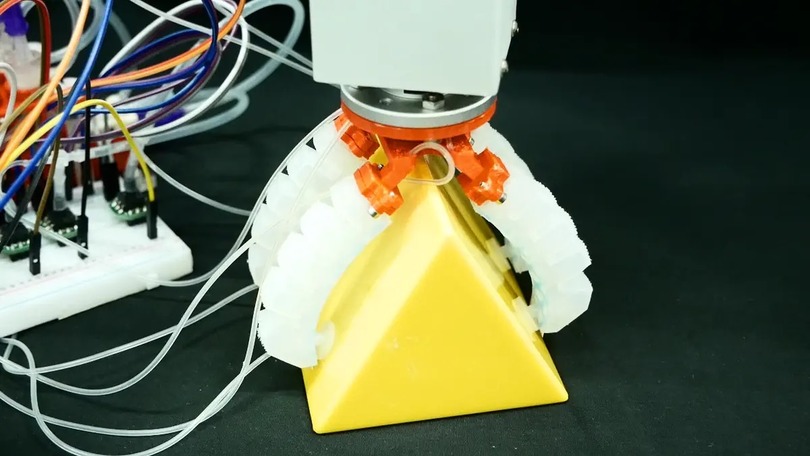
Робот использует систему всасывания не только для захвата объектов, но и для «ощупывания» среды. Встроенные сенсоры позволяют ему:
- Определять, с чем он контактирует (воздух, вода, шероховатая поверхность);
- Предсказывать силу, с которой предмет сопротивляется захвату;
- Бережно брать хрупкие объекты, адаптируя форму щупалец.
Всё это возможно благодаря иерархии «жидкой» логики: простые гидравлические схемы в каждой присоске обрабатывают данные, а «мозг» робота получает лишь минимальную сводку. Такой подход повторяет биологический механизм осьминогов, где 80% нейронов сосредоточены в щупальцах.
Зачем это нужно
Технология открывает путь к энергоэффективным и безопасным роботам:
- В агрокультуре — для сбора фруктов без повреждений;
- На производстве — для работы с хрупкими деталями;
- В медицине — в качестве якорящих инструментов внутри тела;
- В быту — для создания мягких игрушек или носимых устройств, взаимодействующих с человеком.
Разработчики подчёркивают, что ключевое преимущество системы — низкая стоимость. В отличие от традиционных роботов, ей не нужны дорогие датчики или мощный процессор.
Исследование опубликовано в журнале Science Robotics.