Исследователи из Корейского института передовой науки и технологий (KAIST) представили значимый прорыв в области адаптивной робототехники. Разработанная ими программируемая роботизированная пластина способна изгибаться, перемещаться и захватывать объекты без необходимости использования механических соединений или внешней реконфигурации. Эта технология может стать основой для создания роботов нового поколения, которые смогут адаптироваться к окружающей среде в реальном времени.
Сгибание без шарниров
В основе изобретения лежит идея трансформации с помощью сгибания, вдохновлённая оригами. Однако в отличие от традиционных подходов, зависящих от заранее заданных шарниров и фиксированных траекторий, разработка KAIST использует тонкую гибкую полимерную пластину с плотной сетью металлических резисторов.
Эти резисторы выполняют двойную функцию: при нагреве они вызывают изгиб материала, а при охлаждении возвращают его в исходное состояние. Таким образом, лист способен самостоятельно контролировать и корректировать свои движения, не нуждаясь в внешних датчиках или приводах.
Благодаря программному управлению, пользователи могут задавать новые формы, направления и позиции сгибов с помощью простого интерфейса. Команды выполняются автономно, с учётом обратной связи от температурных датчиков, что обеспечивает точность и адаптивность движений.
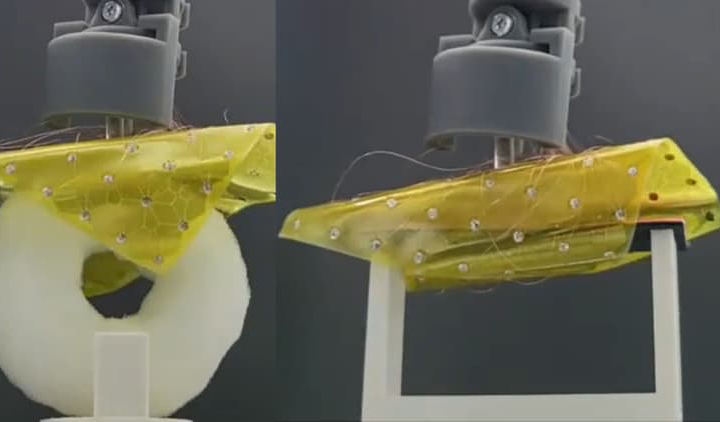
Прототип площадью 40 см² содержит 308 резисторных элементов. Он показал способность выполнять такие действия, как ходьба, ползание и захват объектов (например, чашек Петри или деревянных палочек). Диапазон сгибания составлял от -87° до 109°, а устройство сохраняло работоспособность при температурах от 30°C до 170°C.
«Морфологический разум»
В системе применяется интеграция генетических алгоритмов и глубоких нейросетей для принятия решений относительно поведения при сгибании. Это обеспечивает адаптивную реакцию на различные внешние условия. Также используется система замкнутого цикла управления, которая компенсирует возможные отклонения, например, вызванные изменениями температуры.
По сути, материал не просто изменяет форму — он «думает» через форму, реализуя концепцию «морфологического интеллекта». В одном из тестов роботизированный лист функционировал как хватательное устройство, подстраивающееся под форму предмета. В другом — имитировал движения живого организма при ползании.
Профессор Ким отметил: «Это исследование приближает нас к концепции морфологического интеллекта, когда форма робота становится частью его мышления».
В ближайших планах учёных — увеличение грузоподъёмности устройства, сокращение времени охлаждения и внедрение встроенных электродов без внешней проводки. В долгосрочной перспективе разработка может быть использована в качестве платформы для ИИ в сферах спасательных операций, персонализированной медицины и освоения космоса.
Проект был поддержан Национальным исследовательским фондом Кореи при участии Министерства науки и ИКТ. Работа опубликована в журнале Nature Communications.