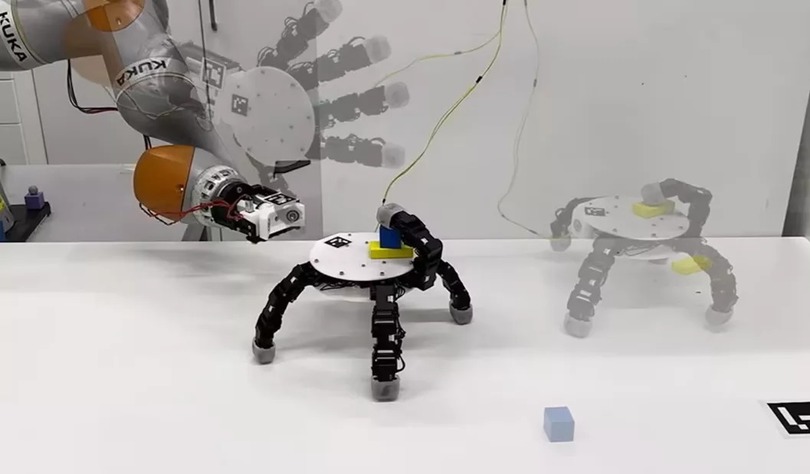
Инженеры Швейцарской федеральной политехнической школы Лозанны (EPFL) решили переосмыслить саму идею человеческой кисти — и начали с радикального шага. Они убрали одно из её фундаментальных ограничений: постоянную связь с рукой. Так появилась роботизированная кисть, способная отсоединяться от манипулятора, самостоятельно перемещаться по поверхностям и захватывать объекты практически с любого направления.
На первый взгляд это выглядит как странный инженерный трюк, но на деле — как логичный этап эволюции робототехники, в которой важнее не сходство с человеческой анатомией, а функциональность.
Кисть с режимом «самостоятельной жизни»
В отличие от классических роботизированных захватов, жёстко закреплённых на манипуляторе, новая система работает в двух режимах. В «обычном» состоянии она выполняет роль стандартного конечного эффектора. Но стоит ей отсоединиться — и кисть превращается в автономный инструмент.
Каждый палец способен двигаться независимо, «ползая» и меняя ориентацию в нескольких направлениях. Координационная система позволяет пальцам не просто шевелиться, а совместно перемещать всю кисть к цели. По сути, это уже не просто часть робота, а маленькая мобильная машина.
Руководитель проекта Сяо Гао, работавший над разработкой в EPFL (сейчас он возглавляет исследования в Уханьском университете), подчёркивает: цель команды заключалась в расширении самого понятия захвата. В человеческой руке почти всё строится вокруг большого пальца. Здесь же каждый палец может «противостоять» любому другому.
Такая симметричная архитектура даёт куда большую свободу движений. Кисть может аккуратно зажимать, обхватывать или поддерживать объект разными парами пальцев — с высокой точностью и контролем. Более того, конструкция позволяет захватывать предметы как «вперёд», так и «назад», что физически недоступно человеческим пальцам.
Одна кисть — вместо двух рук
В ходе испытаний роботизированная кисть выполняла задачи, для которых человеку обычно нужны обе руки. Например, она могла удерживать объект и одновременно прикладывать к нему крутящий момент — как при откручивании крышки бутылки или стабилизации детали во время работы инструментом.
Такая универсальность открывает новые сценарии использования: кисть может держать сразу несколько объектов, манипулировать инструментом и целью одновременно или работать в условиях, где полноценный манипулятор просто не поместится.
Разработчики подчёркивают: проект не задумывался для скрытого наблюдения или «шпионских» задач. Основной фокус — промышленное применение. Инспекция трубопроводов, ремонт механизмов, извлечение деталей из труднодоступных зон — вот где подобная технология может оказаться особенно полезной.
В перспективе мобильный робот с такой отсоединяемой кистью сможет самостоятельно обследовать оборудование, убирать препятствия или работать внутри тесных пространств, куда не доберётся ни человек, ни классический робот-манипулятор.
Разработка уже привлекла внимание специалистов. Доцент Оксфордского института робототехники Дигби Чаппелл назвал кисть «игривой и провокационной», отметив её потенциал как для промышленной автоматизации, так и для исследований в области протезирования. Да, скорость «ползания» пока невысока, но сама идея объединения движения и захвата в одном устройстве заметно расширяет границы того, что мы считаем роботизированной рукой.
Пока что это лабораторный прототип. Но он ясно показывает направление, в котором движется современная робототехника: меньше копирования человека — больше прагматичной инженерной эволюции.















