Эволюция и естественный отбор - самые лучшие инженеры. При всех уязвимостях живых организмов, с точки зрения конструкции они невероятно эффективны. Например, насекомое летает гораздо лучше любого дрона, а проходимость четвероногого животного намного превосходит проходимость колесной техники. Потому инженеры все чаще использую в робототехнике решения, найденные эволюцией. Вероятно, даже исследованием космоса будут заниматься роботы с ногами.
Увы, пока робототехника копирует лишь макроструктуры живых организмов. То есть, вы можете создать человекоподобного робота с руками и ногами, но пока его движениями управляют сервоприводы и гидравлика, сходство с живым организмом довольно поверхностно. Другое дело - если использовать искусственные мускулы.
Все предыдущие попытки создать роботизированные мышцы, не уступающие по эффективности сервоприводам, были не слишком успешными. Разработка получалась либо слишком тяжелой, либо слишком медленной, либо гармонично сочетала в себе оба этих недостатка. Тем не менее, ученым наконец-то удалось создать искусственную мускулатуру, которая является одновременно легкой и ловкой.
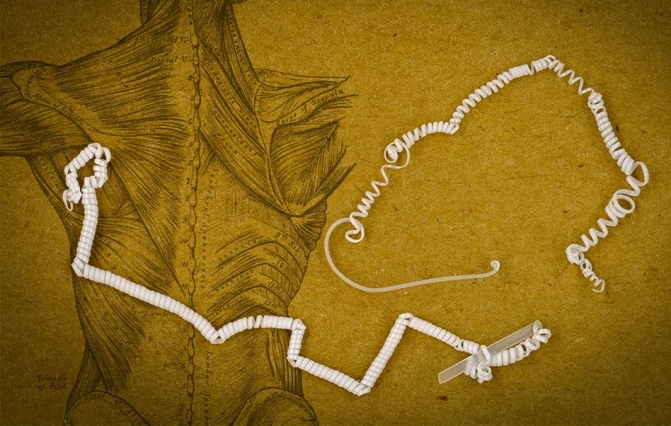
Инженеры Массачусетского технологического института (MIT) разработали мышечные волокна, принцип работы которых очень напоминает принцип работы живых мышц. В разработке используются два полимера, обладающие очень большой разницей коэффициентов теплового расширения - циклический сополимерный эластомер и термопластический полиэтилен. Даже небольшие изменения в температуре волокна приводят к его сокращению. Мышца невероятно сильна. Одно волокно может поднять вес, в 650 раз превышающий его собственный. В то же время, время отклика мышцы измеряется миллисекундами.
Ограничений в габаритах нет. Одно волокно может иметь толщину от нескольких микрометров до нескольких миллиметров. Значит, с его помощью можно создавать как сверхсильные бицепсы, так и тончайшие мимические мышцы. Кроме того, ничто не мешает разработчику сплести несколько волокон в одну очень сильную мышцу. То есть, чем более “накачанным” выглядит робот, тем большей силой он обладает.
Волокнистая конструкция мышц позволяет вплетать в них оптоволокно или термоэлементы. Это в свою очередь, позволяет независимо управлять каждым отдельным участком синтетической мышцы, точно контролируя движения машины.
Пока искусственные мышцы являются лишь частью лабораторного эксперимента, но потенциал этой технологии может радикально изменить облик и принципы работы робототехники. Ведь благодаря им роботы будущего могут очень сильно походить на живых существ.