Используя компоненты с Международной космической станции, инженеры Мичиганского университета разработали более надежные и энергоэффективные роботизированные протезы ног. Прототип обеспечивает пользователю более естественную походку и работает намного тише любых существующих аналогов.
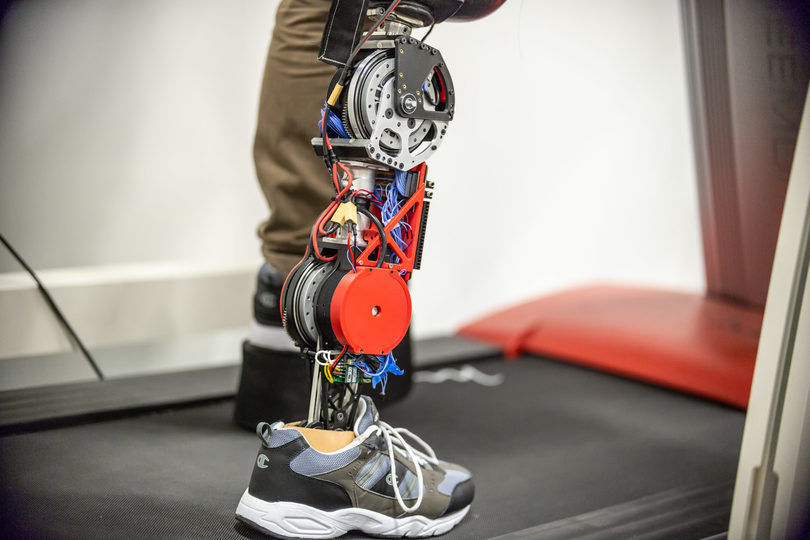
Главным новшеством разработки стали небольшие и мощные приводы, изначально предназначенные для космического роботизированного манипулятора МКС. Прототипа имеет свободно качающееся колено и рекуперативную систему торможения, которая заряжает батарею энергией, захваченной при ударе ноги о землю. Проще говоря, нога подзаряжается в процессе ходьбы. Увы, этой энергии недостаточно для обеспечения полной автономности, так что ногу все еще нужно периодически подзаряжать. Но общий расход энергии сокращается почти вдвое.
“Наш протез ноги потребляет вдвое меньше других современных роботизированных ног, но производить больше силы”, - говорит Роберт Грегг, доцент кафедры электротехники и компьютерной техники в Мичиганском университете.
Борьба за естественную походку
Используя традиционные пассивные протезы, люди с ампутированной нижней частью ноги должны поднимать бедро, чтобы поднять протез стопы с пола и качнуть ногу вперед. Такая походка неестественна. Она вынуждает пользователя протеза тратить больше сил, вызывает дискомфорт в бедрах и нижней части спины, и может повреждать суставы.
Роботизированные ноги, которые помогают человеку делать шаг, обеспечивают гораздо более комфортную походку. Но у них тоже есть недостаток - неестественная жесткость в суставах. “Мы разработали наши суставы так, чтобы они были максимально совместимыми и гибкими. Наша роботизированная нога действует и реагирует как живая конечность, обеспечивая естественное свободное качание колена и поглощение удара при контакте с землей”, - говорит Тоби Элери, первый автор исследования.
Чтобы протез выглядел естественно, приводы в нем должны вписываться в пространство, которое заняла бы обычная конечность. Раньше для этого использовались небольшие двигатели, которые быстро вращались, а система шестерней преобразовала быстрое вращение в силу. Проблема этого подхода в том, что шестерни шумят, снижают КПД системы, прибавляют вес конструкции, и усложняют свободное качание суставов. Группа Грегга решила все эти проблемы, использовав два два более мощных и маленьких двигателя с космической станции. Один из них управляет движением питает колена, а другой - лодыжки.
Более мощный двигатель позволяет использовать меньше шестерней. И это дает массу преимуществ. Во-первых, свободные движения ноги стали более естественными. Во-вторых, уровень шума снизился на порядок. Пользователь все еще издает механическое жужжание при ходьбе, но теперь оно сопоставимо с шумом холодильника, а не пылесоса.
Кроме того, система рекуперативного торможения поглощает часть энергии удара, когда протез стопы касается о земли. “Если суставы жесткие, вся сила удара передается на живую часть конечности, что может быть болезненно. Вместо этого мы используем эту силу, чтобы заряжать батарею ноги”, - говорит Грегг.
Пользователи, которые тестировали протез в лаборатории Грегга, утверждают, что чувствовали, как нога помогала им отталкиваться от земли при ходьбе. Нагрузка на живые мышцы бедра и спины значительно снизилась.
Следующим шагом команда планирует разработать алгоритмы управления, которые позволят ноге автоматически адаптироваться к различным типам местности, скорости ходьбы и видам деятельности пользователя. Университет уже начал поиск коммерческих партнеров для вывода технологии на рынок.
Подробнее с исследованием можно ознакомиться в журнале IEEE Transactions on Robotics.
Если хотите получать новости через мессенджер, подписывайтесь на новый Telegram-канал iGate















