В наши дни создаются роботы с двигательными системами, подходящими под самые разные типы ландшафта. Но, как правило, одна машина наилучшим образом приспособлена к какому-то одному типу окружающей среды. Ученые из Норвежского университета Осло разработали четвероногого робота, который может на ходу регулировать длину ноги, что повышает его энергоэффективность и проходимость на смешанных типах рельефа.
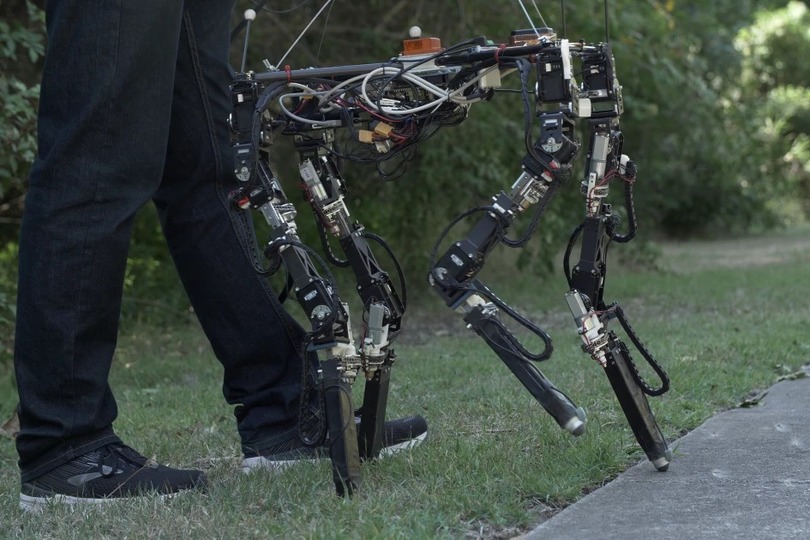
Робот Dyret (“животное” по-норвежски) заявлен как первая четвероногая машина, способная автономно изменять свою морфологию в ответ на различные условия. Используя сочетание датчиков, камер и искусственного интеллекта, робот способен распознавать, какой именно рельеф находится у него под ногами. Далее машина соответствующим образом меняет не только длину ног, но и походку.
“Робот постоянно анализирует окружающую среду, по которой он ходит. С помощью знаний, полученных в контролируемой среде, он использует это для адаптации своего тела”, - говорит Тённес Найгаард, глава исследования.
Для начала ученые обучили робота ходить по гравию, песку и бетону, а затем поставили перед ним задачу ходить по траве, с которой он никогда раньше не сталкивался. Хотя трава не кажется самым сложным типом местности, пучки травы и отверстия в земле могут представлять реальную проблему для длинноногих роботов. Dyret, однако, сам научился ходить по газону, быстро определив идеальную длину ноги для этого.

“Более короткие ноги обеспечивают лучшую стабильность, в то время как более длинные ноги обеспечивают более высокую скорость ходьбы, если грунт достаточно предсказуем”, - говорит член команды разработчиков Кирре Глетт.
Роботы, которые автоматически адаптируются к неожиданной местности, могут найти применение в зонах катастроф, в поисково-спасательных операциях, в сельском хозяйстве и даже при исследовании других планет. Адаптивные способности сделают их более выносливыми и долговечными.

Программное обеспечение робота имеет открытый исходный код. С его помощью разработчики надеются вдохновить других исследователей по всему миру экспериментировать с подобным типом машин.
Исследование опубликовано в журнале Nature Machine Intelligence.