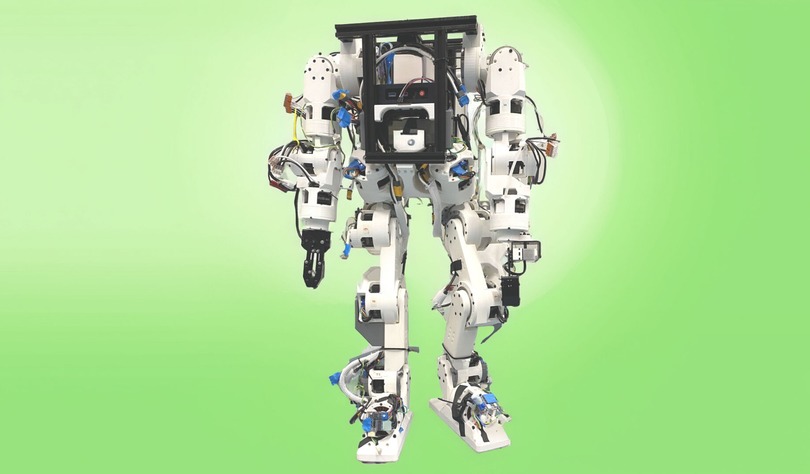
Инженеры Калифорнийского университета в Беркли представили Berkeley Humanoid Lite — недорогого и полностью открытого человекоподобного робота, разработанного для тех, кто делает первые шаги в робототехнике. Робот изготовлен из 3D-печатных деталей и широко доступных комплектующих, что позволяет собрать его без использования специализированного оборудования и при бюджете менее 5000 долларов.
Простота конструкции
Сегодня робототехника активно развивается и находит применение в самых разных сферах — от автоматизации до медицины и научных исследований. Однако высокая стоимость и закрытость коммерческих решений часто становятся преградой для энтузиастов и студентов. Многие из существующих платформ требуют дорогого оборудования, такого как станки с ЧПУ и специализированные печатные платы, что делает самостоятельную сборку практически невозможной.
Berkeley Humanoid Lite устраняет эти барьеры. Он состоит из модульных приводов с циклоидными редукторами, детали которых можно напечатать на обычных настольных 3D-принтерах. Остальные компоненты легко найти на популярных маркетплейсах. Общая стоимость сборки не превышает $5000, что значительно ниже, чем у аналогичных коммерческих моделей.
Технические особенности
Робот весит около 16 килограммов и имеет рост примерно 1 метр. Его основа — это модульные редукторы, специально спроектированные с учётом слабых сторон пластиковых материалов. Циклоидная передача с увеличенными зубьями равномерно распределяет нагрузку, снижая износ и увеличивая срок службы деталей. В ходе испытаний ни один из приводов не вышел из строя, а в случае поломки нужную часть можно просто напечатать заново.
Сборка робота занимает около недели у новичков, и сообщество пользователей активно делится своими наработками и результатами в Discord. Проект предлагает полный доступ к аппаратной части, программному обеспечению и обучающим материалам, что делает его идеальной стартовой платформой для обучения и экспериментов.
Платформа для обучения и развития
Несмотря на свою простоту, робот способен на базовые движения и может захватывать предметы. Управление реализовано через систему телемеханики с использованием джойстика, а обучение движению осуществляется с помощью методов обучения с подкреплением. Хотя стабильная походка пока остаётся задачей на будущее, открытость проекта позволяет пользователям самостоятельно развивать его функциональность.
Как отмечает один из авторов проекта, аспирант кафедры электротехники и компьютерных наук UC Berkeley Юфэн Чи:
"Я верю в силу открытых сообществ, где идеи и знания распространяются свободно. Мы надеемся, что Berkeley Humanoid Lite поможет сделать человекоподобную робототехнику по-настоящему доступной."
Результаты работы команды были представлены на конференции Robotics: Science and Systems 2025.