Мягкая робототехника стремительно меняет представление о том, каким может быть робот. Такие устройства способны плавно перемещаться в тесных или хрупких пространствах, где металлические механизмы рискуют повредить окружающую среду. Уже сегодня мягкие роботы помогают выращивать кораллы в лабораториях и обследовать промышленные трубопроводы. Но на пути к полной автономности их сдерживает главный барьер — питание. Гибкие корпуса требуют столь же гибких источников энергии, а традиционные батареи для этой роли подходят плохо: они ограничивают подвижность, быстро разряжаются и разрушаются под нагрузкой.
Учёные Национального университета Сингапура предложили необычное решение этой проблемы — использовать магнетизм, который обычно служит для движения робота, чтобы одновременно улучшать работу батареи внутри него.
Как работает новая технология
Руководитель исследования, ассистент-профессор Ву Чаншэн, объясняет: магнитные поля давно применяют для "активации" мягких роботов — то есть их движения. Но команда обнаружила, что те же поля могут стабилизировать электрохимические процессы внутри гибких аккумуляторов. Другими словами, один физический принцип обеспечивает и движение, и управление энергией. Это делает робота более самодостаточным и эффективным.
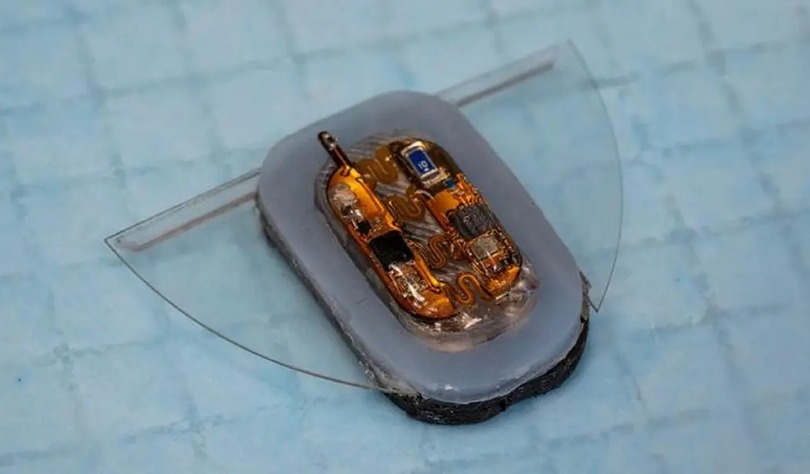
Исследователи разработали гибкие цинк-диоксидо-марганцевые (Zn-MnO₂) батареи, заключённые в мягкий силикон и размещённые вертикально внутри робота, вдохновлённого манторой. Такое вертикальное расположение экономит пространство и сохраняет гибкость конструкции — в отличие от обычного горизонтального размещения батарей.
Синергия движения и энергии
Не случайно моделью для разработки стала морской скат манта. Это животное сочетает движение, восприятие окружающей среды и экономное расходование энергии в одном элегантном теле. Учёные стремились повторить это природное сочетание в роботе.
Опытные испытания показали, что магнитные поля, создаваемые приводами самого робота, стабилизируют химию батареи, уменьшают образование дендритов — игольчатых выростов, которые могут привести к короткому замыканию, — и поддерживают стабильную мощность даже при многократных изгибах. Улучшенные батареи сохраняли 57,3% ёмкости после 200 циклов — почти вдвое больше, чем обычные образцы.
Механизм объясняется просто: магнитное поле создаёт силу Лоренца, которая влияет на движение ионов в электролите. Это делает их распределение более равномерным и предотвращает рост дендритов на аноде. Одновременно магнитное воздействие выравнивает спины электронов в решётке оксида марганца, укрепляя атомные связи и защищая кристаллическую структуру от разрушения.
Робот-мантa
На основе этих разработок команда создала мягкого робота, приводимого в движение магнитными полями. Он оснащён гибкими батареями, магнитными эластомерными приводами и лёгкой схемой для сенсоров и беспроводной связи. Плавники робота взмахивают при воздействии внешнего магнитного поля, позволяя ему плыть, выполнять резкие повороты на 90 градусов и проходить сложные маршруты, передавая данные цифровому «двойнику» в реальном времени.
Встроенные датчики помогают роботу избегать препятствий, корректировать положение и автоматически менять траекторию. Алгоритмы обратной связи компенсируют отклонения в курсе, вызванные волнами или столкновениями, а датчики температуры создают карты тепловых потоков в воде. Гибкое тело позволяет устройству мягко адаптироваться к окружению и не наносить вреда объектам вокруг.
По словам Ву, вертикальная интеграция привода, сенсоров и питания по всей длине корпуса позволяет максимально использовать доступное пространство, не жертвуя "мягкостью" робота. Такой подход делает машину способной чувствовать, реагировать и двигаться в режиме реального времени.
Зачем это нужно
В перспективе команда планирует добавить миниатюрные ультразвуковые или химические датчики и исследовать возможность магнитного усиления других типов батарей, включая гибкие волоконные аккумуляторы для носимой электроники. Это позволит повысить ёмкость и срок работы устройств.
Ву отмечает, что конечная цель — создать мягких роботов, способных самостоятельно думать и действовать в сложных или труднодоступных местах: от обслуживания трубопроводов и мониторинга морских экосистем до помощи в хирургии. Возможно, такие машины станут ещё ближе к природным прототипам — таким как изящная и сильная гигантская манта.
Результаты исследования опубликованы в журнале Science Advances.