Человеческое колено — настоящая жемчужина биомеханики. Это самый крупный шарнирный сустав в теле, но работает он куда сложнее, чем обычная дверная петля. Две округлые кости соединены связками так, что при движении они не только вращаются, но и перекатываются и скользят относительно друг друга. Благодаря этому колено может сгибаться, разгибаться и удерживать равновесие — от спокойной ходьбы до прыжка с разбега.
Именно эта сложная, «живая» кинематика давно привлекает инженеров-робототехников. Исследователи из Гарвардской школы инженерных и прикладных наук имени Джона А. Полсона (Harvard SEAS) предложили новый подход к созданию роботизированных суставов, вдохновлённых устройством колена. Их разработка — так называемые суставы с перекатывающимся контактом (rolling contact joints) — обещает сделать роботизированные захваты, экзоскелеты и подвижных роботов заметно эффективнее и изящнее.
Результаты работы опубликованы в журнале Proceedings of the National Academy of Sciences.
Как работает новый подход
Классическая робототехника во многом полагается на программное управление: траектории движения и распределение усилий задаются алгоритмами. Гарвардская команда пошла другим путём — они «вшивают» эти решения прямо в механику.
Новый метод позволяет на этапе компьютерного проектирования одновременно подбирать форму всех ключевых элементов сустава — контактных поверхностей, гибких соединителей и тросов — под конкретную задачу. Нужно, чтобы робот сильнее отталкивался в конце шага? Или чтобы захват аккуратно обхватывал хрупкий предмет, а затем резко увеличивал усилие? Геометрия сустава настраивается именно под это.
«Если у вас есть робот и вы понимаете, что он должен делать — например, ходить, — вы можете заранее определить, где именно ему нужно выдавать максимальное усилие, — объясняет Колтер Декер, аспирант Harvard SEAS и первый автор исследования. — В ходьбе, скажем, важно мощное отталкивание в конце шага. Если заложить это прямо в механику, робот станет эффективнее и сможет обходиться меньшими приводами».
Проще говоря, часть работы, которую обычно берёт на себя электроника и сложное управление, перекладывается на форму и материалы самого сустава.
Механика вместо сложного управления
Роберт Вуд, профессор инженерных и прикладных наук и соавтор работы, подчёркивает философию проекта: конструкция робота, его задача и система управления должны рассматриваться как единое целое.
«Мы стремимся передать как можно больше управления движением самой механике и материалам, — говорит он. — Тогда система управления может сосредоточиться на задачах более высокого уровня. Метод Колтера делает это чрезвычайно элегантно — и с математической, и с инженерной точки зрения».
Ключевым элементом здесь стали суставы с перекатывающимся контактом — пары изогнутых поверхностей, которые катятся друг по другу и удерживаются гибкими связями. В отличие от привычных подшипников или четырёхзвенников, такие суставы обладают малым трением, высокой износостойкостью и естественной гибкостью.
От мягкого захвата к «искусственному колену»
Толчком к разработке послужил другой проект лаборатории Вуда — создание мягкого роботизированного захвата, который мог бы бережно обнимать предметы, но при необходимости прикладывать большую силу. Поиск компромисса между жёсткими звеньями и мягкими соединениями, похожего на сочетание костей и хрящей в человеческой руке, и привёл исследователей к идее оптимизированных перекатывающихся суставов.
В традиционных конструкциях такие суставы обычно имеют простую круглую форму. Новый же математический аппарат позволяет создавать некруглые, асимметричные и даже «странные» поверхности, которые следуют заданной траектории и обеспечивают нужное соотношение усилий вдоль движения.
«Мы задались вопросом: если нам известна желаемая траектория и то, как должно передаваться усилие, можем ли мы найти форму поверхностей и систему тросов, которые это обеспечат? — поясняет Декер. — Оказалось, что да. И этот подход можно применять к ходьбе, прыжкам или захвату объектов».
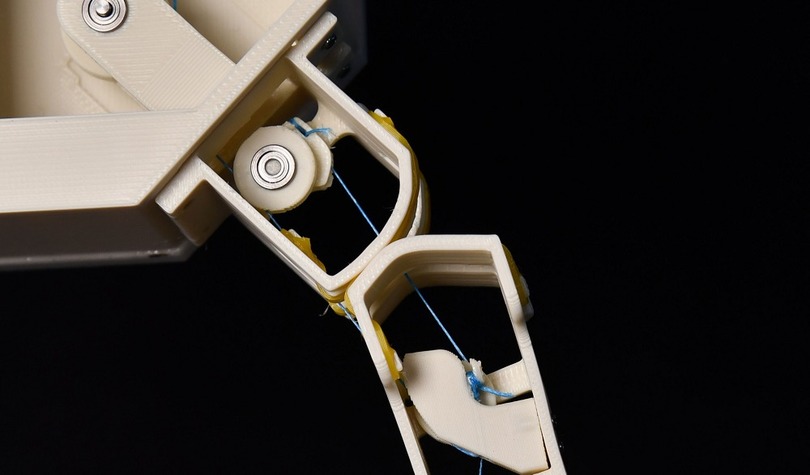
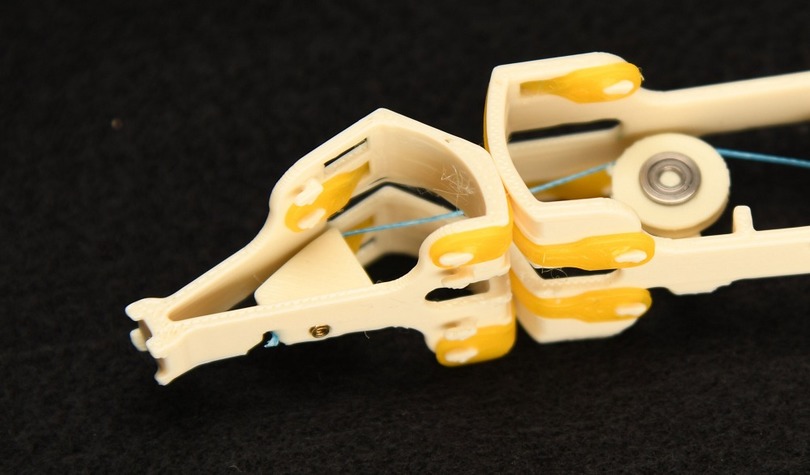
Чтобы проверить метод на практике, команда собрала два прототипа: коленоподобный сустав и двухпальцевый роботизированный захват.
Экзоскелеты и ортезы для колена часто используют простые подшипники, расположенные рядом с суставом. Проблема в том, что реальное колено не вращается вокруг фиксированной оси — оно смещается, катится и скользит. Из-за этого возникают болезненные перекосы и дискомфорт.
Используя усреднённую траекторию движения человеческого колена, исследователи спроектировали оптимизированный перекатывающийся сустав, максимально близкий к естественной кинематике. Сравнение со стандартной конструкцией показало впечатляющий результат: несоосность была снижена на 99%.
Это открывает перспективы для создания индивидуально подогнанных наколенников, экзоскелетов и даже суставных имплантов, учитывающих конкретную биомеханику человека.
Второй прототип — роботизированный захват — продемонстрировал не меньший эффект. Суставы пальцев были оптимизированы так, чтобы максимальное усилие возникало в зависимости от размера объекта. В результате захват смог удерживать более чем в три раза больший вес по сравнению с аналогичной конструкцией на стандартных круглых суставах и шкивах при том же приводе.
Возможность проектировать «человекообразные» суставы под конкретные задачи открывает широкие горизонты: от специализированных роботов и вспомогательных устройств до более глубокого изучения биомеханики животных. Теперь инженеры могут не просто копировать внешний вид движений, но и воспроизводить их внутреннюю логику.
Если раньше роботам приходилось «думать», как двигаться, то теперь часть этой мудрости можно заложить прямо в форму сустава. А разве не так устроена сама природа?