Учёные из University of Michigan представили модульного робота с открытым исходным кодом, способного буквально «перекраивать» собственное тело. Машина получила название TROT — The Robot of Theseus. Её главная задача — помочь биологам и робототехникам разобраться, как именно особенности анатомии влияют на движение.
Можно ли, например, точно сказать, почему гепард бежит быстрее всех наземных животных? Или за счёт чего волк так вынослив? Эксперименты с живыми организмами дают подсказки, но слишком много факторов меняются одновременно — масса конечностей, свойства мышц, подвижность суставов. Выделить один-единственный параметр почти невозможно. Именно для этого и понадобился TROT.
Как устроен робот TROT
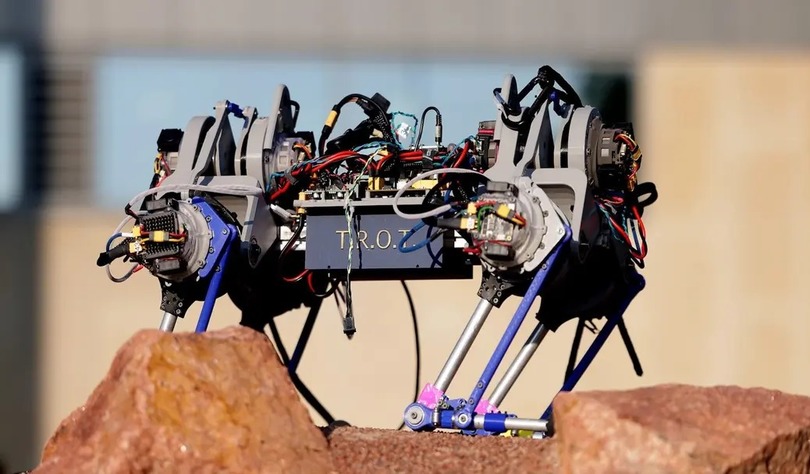
TROT — это четырёхногий робот, собранный из коммерчески доступных электродвигателей и в основном напечатанный на 3D-принтере. Его конструкция модульная: длину конечностей, распределение массы и диапазон движений суставов можно быстро менять, просто переставляя детали.
При наличии обычного 3D-принтера стоимость всех компонентов не превышает 4000 долларов — весьма скромная сумма по меркам исследовательской робототехники.
Планы робота доступны публично. Разработчики специально сделали систему максимально понятной: большинство деталей стыкуются только одним способом, что снижает вероятность ошибок и ускоряет сборку. По сути, это конструктор для серьёзной науки.
Как отмечает первый автор работы Картик Урс, традиционные промышленные роботы стоят дорого и требуют сложного производства. TROT же создавался с прицелом на простоту изготовления и гибкость конфигурации.
«Пересобрать» эволюцию за 20 минут
Один из ключевых авторов проекта — Талия Мур, доцент робототехники с бэкграундом в эволюционной биологии. В палеонтологии, объясняет она, кости дают представление о строении тела вымерших животных, но ничего не говорят напрямую об их скорости или выносливости. Как изменения длины конечностей повлияли на стиль передвижения — остаётся предметом догадок.
Создание нового робота под каждую гипотезу занимало годы. TROT решает эту проблему иначе: он может быстро менять пропорции, имитируя разные виды — в том числе вымершие. По словам исследователей, «60 миллионов лет изменений размеров тела могут произойти за 20 минут».
Иначе говоря, теперь можно оперативно проверить, как именно эволюционные изменения конечностей отражались на механике движения.
Как изолировать один параметр из десятков?
Идея создать TROT частично вдохновлена экспериментом 1974 года, в котором сравнивали гепардов и коз. Согласно законам физики, если масса конечности распределена дальше от бедра, её труднее раскачивать — требуется больше энергии. У гепардов лапы «заострённые», с меньшим моментом инерции, что должно делать бег более энергоэффективным.
Однако эксперимент показал неожиданное: гепарды и козы тратят примерно одинаковое количество энергии при беге. Почему? Потому что различий между ними слишком много — не только распределение массы, но и мышцы, сухожилия, суставная механика.
Команда Мур использовала TROT, чтобы изменить только один параметр — распределение веса в конечностях — и напрямую измерить, как это влияет на энергозатраты. Все остальные характеристики при этом оставались неизменными.
Такой подход позволяет впервые по-настоящему «очистить» эксперимент от сопутствующих факторов.
Принцип действия
Чтобы имитировать пружинящие свойства мышц и сухожилий, разработчики отказались от физических пружин. Вместо этого TROT использует так называемые обратимые (backdrivable) моторы, способные возвращать энергию при обратном движении.
Это важно: механические пружины могут вносить погрешности в измерения. Моторная система позволяет аккуратно моделировать накопление и возврат энергии, сохраняя точность данных и при этом воспроизводя биологические механизмы.
По сути, робот работает как упрощённая, но управляемая модель живого организма.
Почему это важно для робототехники?
Хотя TROT создавался прежде всего как исследовательский и образовательный инструмент, его результаты могут повлиять и на коммерческую робототехнику. Сегодня большинство четвероногих роботов используют схожую конструкцию передних и задних конечностей.
Но действительно ли универсальный дизайн оптимален? Или специализированные конфигурации ног могут дать выигрыш в скорости, манёвренности или энергоэффективности — достаточный, чтобы оправдать более сложное производство?
Модульная платформа вроде TROT позволяет инженерам протестировать такие гипотезы до начала дорогостоящей разработки. Исследование опубликовано в журнале Bioinspiration and Biomimetics, а чертежи и инструкции доступны для свободного скачивания.