Ученые разработали новый тип роботов, конструкция которых была скопирована с живых улиток. Эти роботы способны работать как автономно, так и объединяться в группы для выполнения сложных задач.

“Роевые” улитки
Концепция "роевой робототехники" предполагает использование небольших роботов, которые могут действовать самостоятельно или как часть группы идентичных роботов. В последнем случае роботы взаимодействуют друг с другом, координируя свои движения для достижения общей цели.
Такие роботы могут использоваться для поиска выживших в зонах стихийных бедствий, проведения разведки в опасных средах или даже исследования поверхности других планет.
Для некоторых применений роботы должны физически соединяться друг с другом. Воздушные и подводные роботы, способные перемещаться как по горизонтали, так и по вертикали, могут формировать трехмерные структуры при объединении. Но наземные роботы, ограниченные горизонтальным перемещением, могут образовывать только двухмерные фигуры, что ограничивает их возможности.
Новое изобретение - робот-улитка - решает эту проблему.

Как это работает?
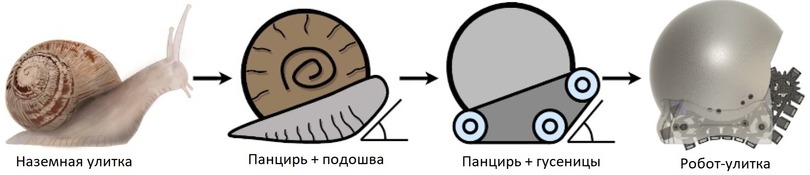
Разработанный учеными из Гонконга, робот-улитка вдохновлен сухопутным моллюском - белой нефритовой улиткой.
Робот имеет сферический ферромагнитный железный корпус, внутри которого находятся батарея, микропроцессор и другая электроника. На нижней части корпуса расположены гусеничные траки из резины с встроенными магнитами. Между траками находится выдвижная вакуумная присоска.
В режиме "свободного движения" присоска остается втянутой и неактивной. Робот перемещается по ровной или неровной поверхности на гусеницах, используя магниты для подъема на корпуса других роботов-улиток.
Оказавшись на нужном месте, робот опускает и активирует присоску. Она прочно прикрепляется к корпусу другого робота, надежно соединяя их. При этом корпус робота может вращаться относительно присоски, позволяя ему поворачиваться на месте без потери вакуума.
В ходе испытаний группы роботов-улиток успешно выполнили совместные задачи, такие как подъем на уступы, преодоление препятствий и формирование единого роботизированного манипулятора.
Описание уникальной разработки опубликовано в журнале Nature Communications.