Исследователи из Корнельского университета представили фреймворк BeyondMimic, позволяющий гуманоидным роботам воспроизводить сложные человеческие движения. В основе системы лежит использование данных захвата движения (motion capture), которые затем преобразуются в единую «политику» для управления роботом.
Главная особенность подхода — робот не просто повторяет отдельные действия, а способен плавно переходить от одного движения к другому, сохраняя стиль, ритм и выразительность оригинала. Для этого применяется Марковский процесс принятия решений (MDP) и набор универсальных гиперпараметров, что исключает необходимость программировать каждую задачу отдельно.
Ключевой инновацией стала loss-guided diffusion — методика, позволяющая корректировать движения робота в реальном времени с помощью простых дифференцируемых функций стоимости. Это обеспечивает точность, адаптивность и возможность выполнять новые задания без предварительного обучения.
Зачем это нужно
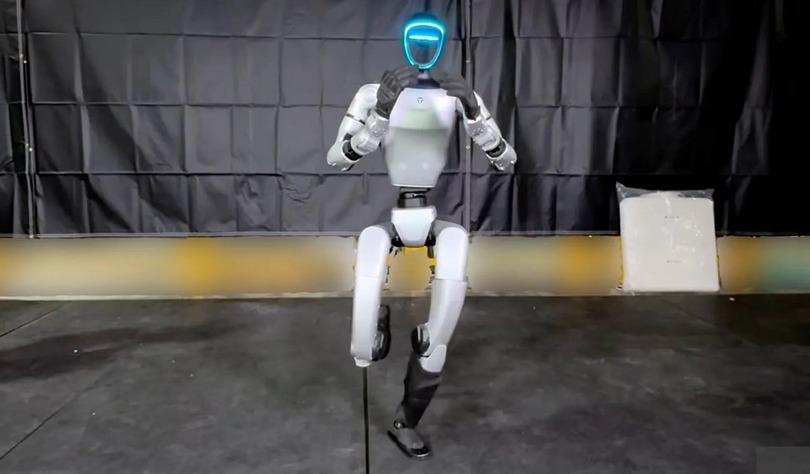
Разработчики продемонстрировали возможности системы в видеоролике, где гуманоид выполняет бег, акробатические элементы, танцевальные движения и даже известное празднование голов Криштиану Роналду «Siu». При этом все действия не были заранее запрограммированы — робот самостоятельно адаптировал их из записей человеческих движений.
BeyondMimic открывает перспективы для практического применения в самых разных областях:
- медицина и реабилитация — помощь в уходе за людьми и обучении движению;
- образование и тренировки — интерактивные инструменты для обучения;
- развлечения — реалистичные движения в перформансах и играх;
- навигация и сервис — выполнение задач с учетом препятствий и взаимодействие с людьми.
Система уже доступна в открытом доступе, что делает её основой для дальнейших исследований и разработок.
Идея о том, что гуманоидные роботы смогут двигаться и действовать как люди, долго оставалась мечтой инженеров. С появлением BeyondMimic этот сценарий становится ближе к реальности. Открытость, адаптивность и выразительность движений создают фундамент для внедрения роботов в сферы, где требуется не только функциональность, но и гибкость.