Четвероногие робопсы уже не раз доказывали свою эффективность. Они работают пастухами, инспектируют буровые установки, а при необходимости - таскают за собой многотонные грузовики. Но даже у них еще имеется несколько ограничений. В большинстве случаев четвероногим машинам нужна широкая поверхность для ходьбы. Даже самому продвинутому роботу Spot сложно сохранить равновесие на бревне или тонкой жердочке. Команда итальянских исследователей робототехники стремится это изменить.
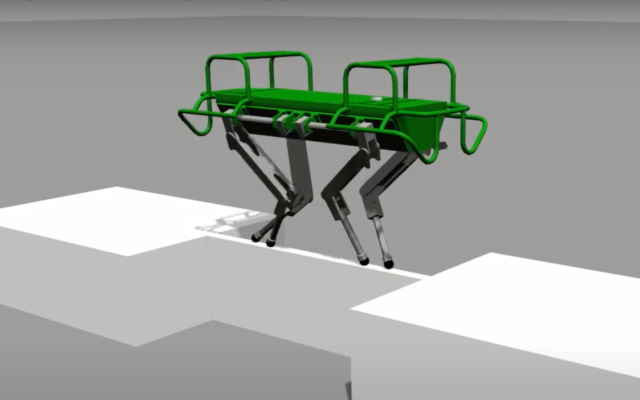
Инженеры Итальянского технологического института (IIT) создали роботизированный контроллер, который позволяет роботу с четырьмя ногами ходить по очень тонкой дощечке. С его помощью четвероногий робот может балансировать всего на двух ногах и ходить по линии, приставляя пятку одной ноги к носку другой. В цифровом моделировании контроллер позволил 90-килограммовому роботу пересекать мост шириной всего в шесть сантиметров.
На видео исследователи IIT демонстрируют, как такой робот, оснащенный контроллером, в реальности поддерживает равновесие на двух ногах, даже когда его толкают. Машина может поддерживать баланс на двух ногах, даже если эти ноги стоят на разной высоте:
Разработчики подробно изложили свои выводы в статье, размещенной в библиотеке arXiv.