Ученые создали уникального четвероногого робота, который способен передвигаться по любым вертикальным поверхностям. Идею разработчики подсмотрели в живой природе.
Инженеры из Университета Карнеги-Меллона (США) назвали свое изобретение LORIS, что является отсылкой к сумчатому млекопитающему – лори. Название расшифровывается как "Легкий наблюдательный робот для неровных склонов" (Lightweight Observation Robot for Irregular Slopes).
Как это работает?
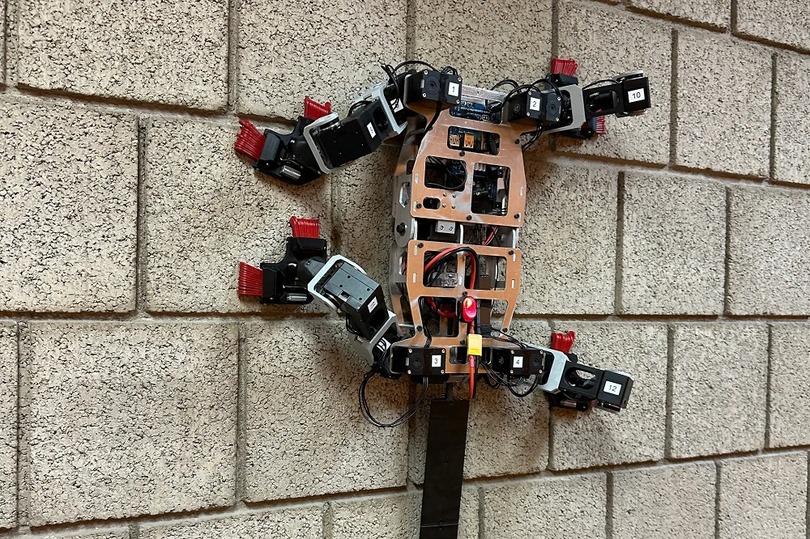
Главная особенность LORIS – био-мимикрия. На концах его четырех ног расположены специальные микрошиповые захваты, имитирующие коготки насекомых. Эти захваты состоят из двух групп микроскопических крючков, расположенных перпендикулярно друг другу.
В отличие от роботов, использующих присоски для гладких поверхностей, LORIS эффективно передвигается по скалам и другим неровным рельефам. Микрошипы цепляются за малейшие неровности, обеспечивая надежное сцепление.

Для управления роботом используется простая, но эффективная стратегия, позаимствованная у насекомых – направленное внутреннее схватывание (directed inward grasping, DIG). Суть метода заключается в том, что робот выдвигает поочередно диагонально расположенные ноги. Когда микрошипы одной ноги цепляются за поверхность, то же самое происходит и с противоположной ногой. Это обеспечивает надежную фиксацию, в то время как две другие ноги робота свободны для следующего шага.
По словам ученых, LORIS сочетает в себе легкость, скорость, энергоэффективность пассивных микрошиповых захватов с надежностью и адаптивностью активных захватов. Кроме того, простота конструкции делает робота недорогим в производстве.
Разработка представлена на конференции International Conference on Robotics and Automation.















